
Содержание
📝Фундаментальная система решений
Чтобы понять, что такое фундаментальная система решений вы можете посмотреть видео-урок для этого же примера кликнув здесь. Теперь перейдем собственно к описанию всей необходимой работы. Это поможет вам более детально разобраться в сути данного вопроса.
Как найти фундаментальную систему решений линейного уравнения?
Возьмём для примера такую систему линейных уравнений:
Найдём решение этой линейной системы уравнений методом Гаусса. Для начала нам надо выписать матрицу коэффициентов системы.
Преобразуем эту матрицу к треугольной. Первую строку переписываем без изменений. И все элементы, что стоят под $a_{11}$, надо сделать нулями. Что бы сделать ноль в место элемента $a_{21}$, надо от второй строки вычесть первую, и разность записать во второй строке. Что бы сделать ноль в место элемента $a_{31}$, надо от третьей строки вычесть первую и разность записать в третьей строке. Что бы сделать ноль в место элемента $a_{41}$, надо от четвёртой строки вычесть первую умноженную на 2 и разность записать в четвёртой строке. Что бы сделать ноль в место элемента $a_{31}$, надо от пятой строки вычесть первую умноженную на 2 и разность записать в пятой строке.
Что бы сделать ноль в место элемента $a_{41}$, надо от четвёртой строки вычесть первую умноженную на 2 и разность записать в четвёртой строке. Что бы сделать ноль в место элемента $a_{31}$, надо от пятой строки вычесть первую умноженную на 2 и разность записать в пятой строке.
Первую и вторую строку переписываем без изменений. И все элементы, что стоят под $a_{22}$, надо сделать нулями. Что бы сделать ноль в место элемента $a_{32}$, надо от третьей строки вычесть вторую умноженную на 2 и разность записать в третьей строке. Что бы сделать ноль в место элемента $a_{42}$, надо от четвёртой строки вычесть вторую умноженную на 2 и разность записать в четвёртой строке. Что бы сделать ноль в место элемента $a_{52}$, надо от пятой строки вычесть вторую умноженную на 3 и разность записать в пятой строке.
Видим, что последние три строки – одинаковые, поэтому если от четвёртой и пятой вычесть третью, то они станут нулевыми.
По этой матрице записываем новую систему уравнений.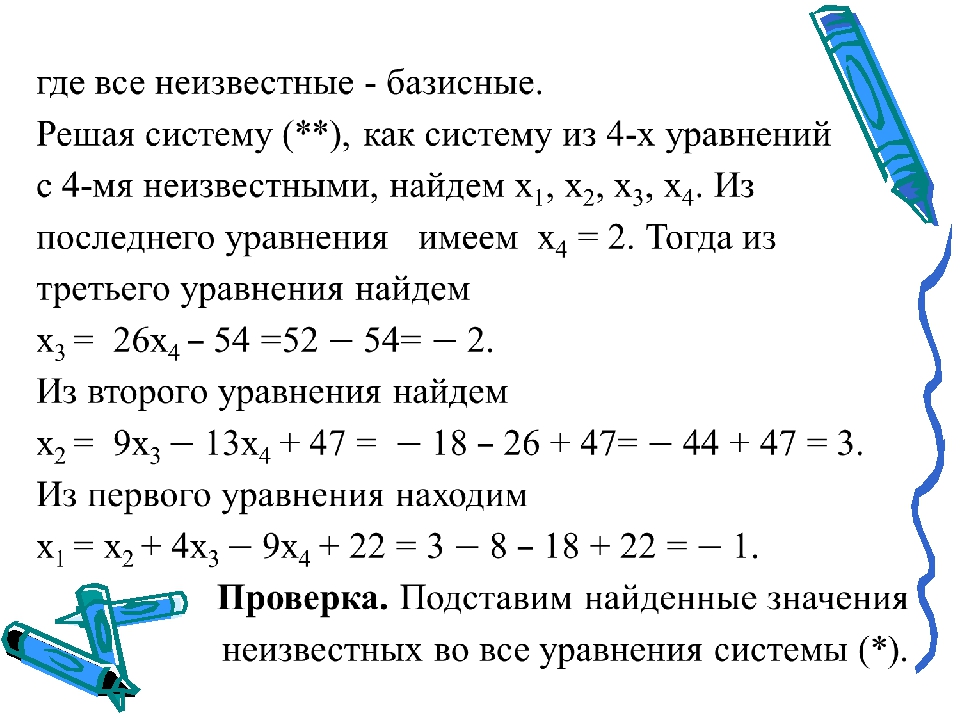
Видим, что линейно независимых уравнений у нас, только три, а неизвестных пять, поэтому фундаментальная система решений будет состоять из двух векторов. Значит, нам надо перенести две последние неизвестные вправо.
Теперь, начинаем выражать те неизвестные, что стоят в левой части через те, что стоят в правой части. Начинаем с последнего уравнения, сначала выразим $x_3$, потом полученный результат подставим во второе уравнение и выразим $x_2$, а потом в первое уравнение и тут выразим $x_1$. Таким образом мы все неизвестные, что стоят в левой части, выразили через неизвестные, что стоят в правой части.
После чего вы вместо $x_4$ и $x_5$, можем подставлять любые числа и находить $x_1$, $x_2$ и $x_3$. Каждая такая пятёрка чисел будет корнями нашей изначальной системы уравнений. Что бы найти векторы, что входят в ФСР нам надо вместо $x_4$ подставить 1, а вместо $x_5$ подставить 0, найти $x_1$, $x_2$ и $x_3$, а потом наоборот $x_4=0$ и $x_5=1$.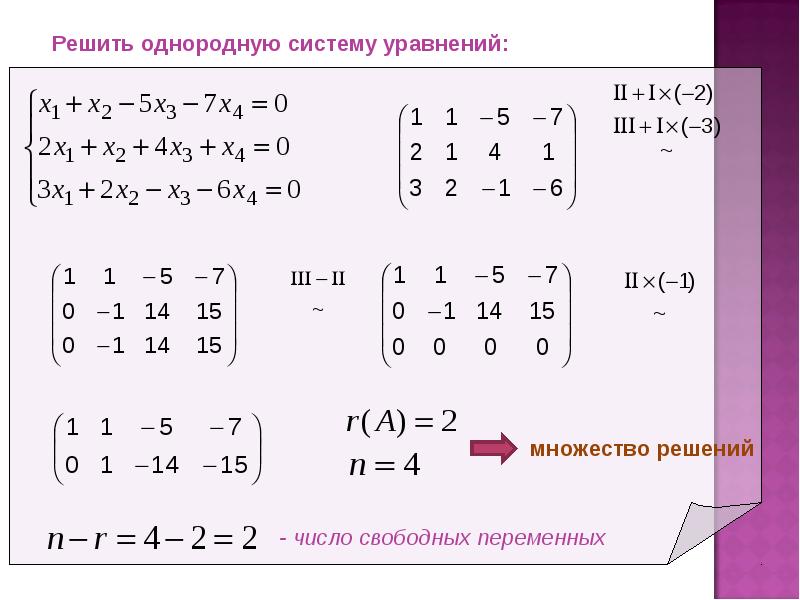
Какие именно векторы создают фундаментальную систему решений данной системы уравнений?
Для лучшего понимания хода роботы можете посмотреть видео-урок по данном задании.
Материалы по теме:
Поделиться с друзьями:
Загрузка…
Системы линейных уравнений с двумя переменными
Мы уже знакомы с понятием линейное уравнение с двумя неизвестными. Уравнения могут в одной задаче присутствовать как поодиночке, так и по несколько уравнений сразу. В таки случаях уравнения объединяют в систему уравнений.
Что такое систеам линейных уравнений
Система уравнений — это два или несколько уравнений, для которых необходимо найти все их общие решения. Обычно для записи системы уравнений, их записывают в столбик и рисуют одну общую фигурную скобку. Запись системы линейных уравнений представлена ниже.
{ 4x + 3y = 6
{ 2x + y = 4
Данная запись означает, что задана система из двух уравнений, с двумя переменными.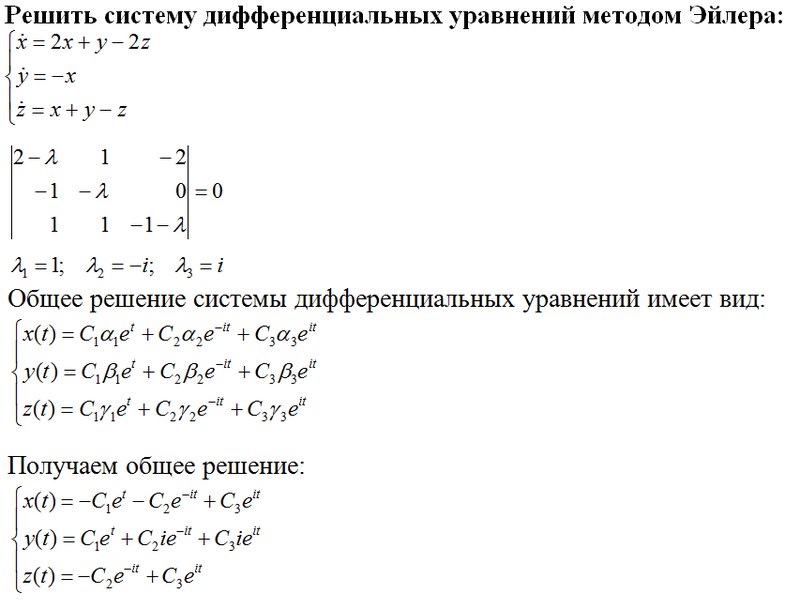 Если бы в системе было три уравнения, то речь шла бы о системе из трех уравнений. И так для любого количества уравнений.
Если бы в системе было три уравнения, то речь шла бы о системе из трех уравнений. И так для любого количества уравнений.
Если в системе все присутствующие уравнения линейные, то говорят, что задана система линейных уравнений. В примере выше, как раз представлена система из двух линейных уравнений. Как уже отмечалось выше, система может иметь общие решения. О термине «общее решение» мы поговорим ниже.
Что является решением?
Решением системы двух уравнений с двумя неизвестными называют пару чисел (x,y) такую, что если подставить эти числа в уравнения системы, то каждое из уравнений системы обращается в верное равенство.
Например, у нас есть система из двух линейных уравнений. Решением первого уравнения будут все пары чисел, которые удовлетворяют этому уравнению.
Для второго уравнения решением будут пары чисел, которые удовлетворяют этому уравнению. Если существует такая пара чисел, которая удовлетворяет как первому, так и второму уравнению, то эта пара чисел и будет решением системы двух линейных уравнений с двумя неизвестными.
Графическое решение
Графически, решением линейного уравнения являются все точки некоторой прямой на плоскости.
Для системы линейных уравнений будем иметь несколько прямых (по количеству уравнений). А решением системы уравнений, будет являться точка, в которой пересекаются ВСЕ прямые. Если такой точки нет, то система не будет иметь решений. Точка, в которой пересекаются все прямые, принадлежит каждой из этих прямой, поэтому решение называют общим.
Кстати, построение графиков уравнений системы и отыскание их общей точки, это один из способов решения системы уравнений. Данный способ называется графическим.
Другие способы решения линейных уравнений
Существуют и другие способы решения систем линейных уравнений с двумя переменными. Основные способы решения систем линейных уравнений с двумя неизвестными:
1. Способ подстановки,
2. Способ сложения.
Нужна помощь в учебе?
Предыдущая тема: График линейного уравнения с двумя переменными: алгоритм построения
Следующая тема:   Решение систем уравнений: способ подстановки + примеры
Метод Гаусса для решения систем линейных уравнений (стр.
 1 из 2)
1 из 2)
1. Система линейных алгебраических уравнений
1.1 Понятие системы линейных алгебраических уравнений
Система уравнений – это условие, состоящее в одновременном выполнении нескольких уравнений относительно нескольких переменных. Системой линейных алгебраических уравнений (далее – СЛАУ), содержащей m уравнений и n неизвестных, называется система вида:
где числа aij называются коэффициентами системы, числа bi – свободными членами, aij и bi (i=1,…, m; b=1,…, n) представляют собой некоторые известные числа, а x1,…, xn – неизвестные. В обозначении коэффициентов aij первый индекс i обозначает номер уравнения, а второй j – номер неизвестного, при котором стоит этот коэффициент. Подлежат нахождению числа xn. Такую систему удобно записывать в компактной матричной форме: AX=B. Здесь А – матрица коэффициентов системы, называемая основной матрицей;
– вектор-столбец из неизвестных xj.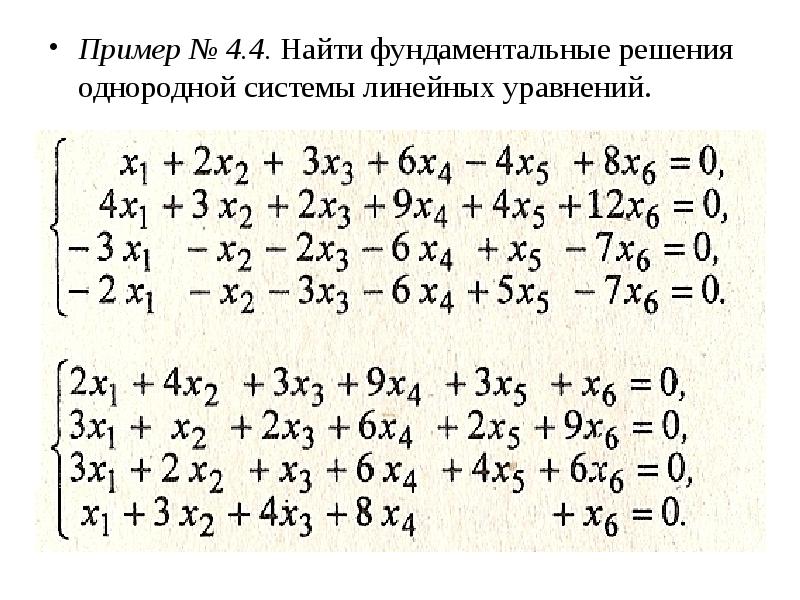
– вектор-столбец из свободных членов bi.
Произведение матриц А*Х определено, так как в матрице А столбцов столько же, сколько строк в матрице Х (n штук).
Расширенной матрицей системы называется матрица A системы, дополненная столбцом свободных членов
1.2 Решение системы линейных алгебраических уравнений
Решением системы уравнений называется упорядоченный набор чисел (значений переменных), при подстановке которых вместо переменных каждое из уравнений системы обращается в верное равенство.
Решением системы называется n значений неизвестных х1=c1, x2=c2,…, xn=cn, при подстановке которых все уравнения системы обращаются в верные равенства. Всякое решение системы можно записать в виде матрицы-столбца
Система уравнений называется совместной, если она имеет хотя бы одно решение, и несовместной, если она не имеет ни одного решения.
Совместная система называется определенной, если она имеет единственное решение, и неопределенной, если она имеет более одного решения.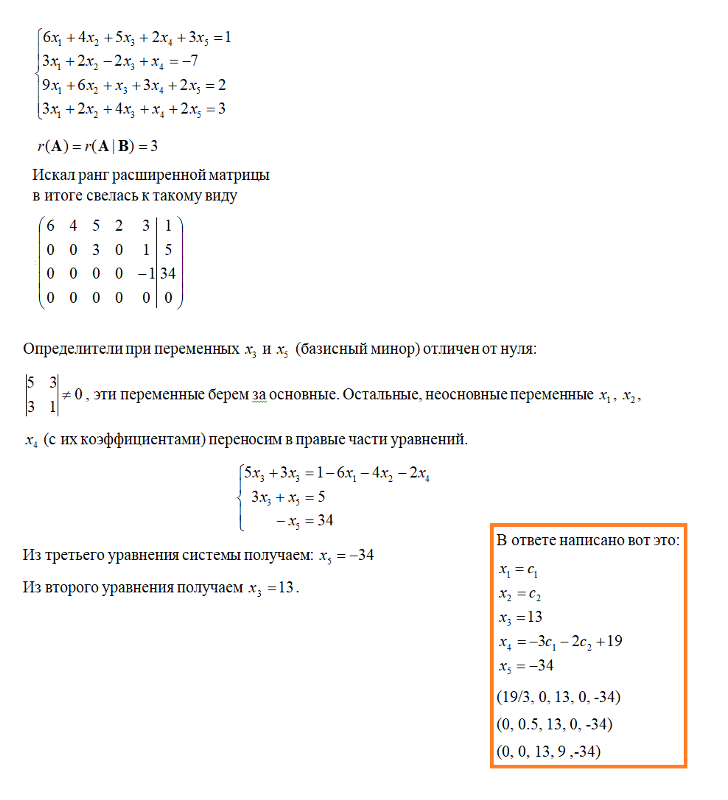 В последнем случае каждое ее решение называется частным решением системы. Совокупность всех частных решений называется общим решением.
В последнем случае каждое ее решение называется частным решением системы. Совокупность всех частных решений называется общим решением.
Решить систему – это значит выяснить, совместна она или несовместна. Если система совместна, найти ее общее решение.
Две системы называются эквивалентными (равносильными), если они имеют одно и то же общее решение. Другими словами, системы эквивалентны, если каждое решение одной из них является решением другой, и наоборот.
Преобразование, применение которого превращает систему в новую систему, эквивалентную исходной, называется эквивалентным или равносильным преобразованием. Примерами эквивалентных преобразований могут служить следующие преобразования: перестановка местами двух уравнений системы, перестановка местами двух неизвестных вместе с коэффициентами у всех уравнений, умножение обеих частей какого-либо уравнения системы на отличное от нуля число.
Система линейных уравнений называется однородной, если все свободные члены равны нулю:
Однородная система всегда совместна, так как x1=x2=x3=…=xn=0 является решением системы. Это решение называется нулевым или тривиальным.
Это решение называется нулевым или тривиальным.
2. Метод исключения Гаусса
2.1 Сущность метода исключения Гаусса
Классическим методом решения систем линейных алгебраических уравнений является метод последовательного исключения неизвестных – метод Гаусса (его еще называют методом гауссовых исключений). Это метод последовательного исключения переменных, когда с помощью элементарных преобразований система уравнений приводится к равносильной системе ступенчатого (или треугольного) вида, из которого последовательно, начиная с последних (по номеру) переменных, находятся все остальные переменные.
Процесс решения по методу Гаусса состоит из двух этапов: прямой и обратный ходы.
1. Прямой ход.
На первом этапе осуществляется так называемый прямой ход, когда путём элементарных преобразований над строками систему приводят к ступенчатой или треугольной форме, либо устанавливают, что система несовместна. А именно, среди элементов первого столбца матрицы выбирают ненулевой, перемещают его на крайнее верхнее положение перестановкой строк и вычитают получившуюся после перестановки первую строку из остальных строк, домножив её на величину, равную отношению первого элемента каждой из этих строк к первому элементу первой строки, обнуляя тем самым столбец под ним.
После того, как указанные преобразования были совершены, первую строку и первый столбец мысленно вычёркивают и продолжают пока не останется матрица нулевого размера. Если на какой-то из итераций среди элементов первого столбца не нашёлся ненулевой, то переходят к следующему столбцу и проделывают аналогичную операцию.
На первом этапе (прямой ход) система приводится к ступенчатому (в частности, треугольному) виду.
Приведенная ниже система имеет ступенчатый вид:
,
где
Коэффициенты aii называются главными (ведущими) элементами системы.
1-й шаг.
Будем считать, что элемент
(если a11=0, переставим строки матрицы так, чтобы a11 не был равен 0. Это всегда возможно, т. к. в противном случае матрица содержит нулевой столбец, ее определитель равен нулю и система несовместна).
Преобразуем систему, исключив неизвестное х1 во всех уравнениях, кроме первого (используя элементарные преобразования системы). Для этого умножим обе части первого уравнения на
и сложим почленно со вторым уравнением системы (или из второго уравнения почленно вычтем первое, умноженное на ).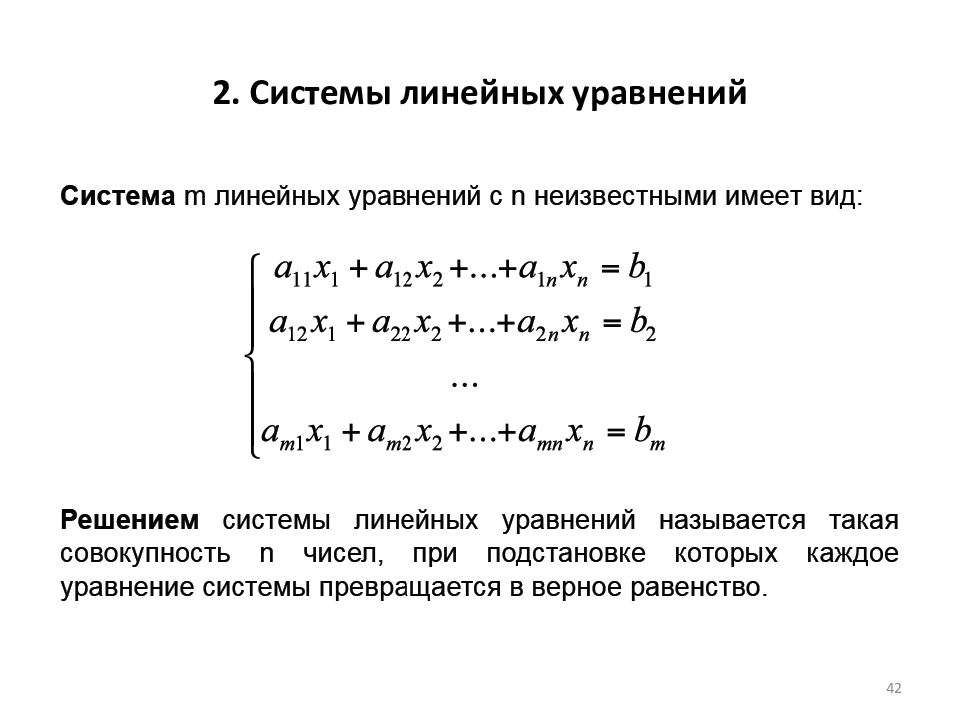 Затем умножим обе части первого уравнения на и сложим с третьим уравнением системы (или из третьего почленно вычтем первое, помноженное на ). Таким образом, последовательно умножаем первую строку на число и прибавляем к i-й строке, для i=2, 3, …, n.
Затем умножим обе части первого уравнения на и сложим с третьим уравнением системы (или из третьего почленно вычтем первое, помноженное на ). Таким образом, последовательно умножаем первую строку на число и прибавляем к i-й строке, для i=2, 3, …, n.
Продолжая этот процесс, получим эквивалентную систему:
Здесь
– новые значения коэффициентов при неизвестных и свободные члены в последних m-1 уравнениях системы, которые определяются формулами:
Таким образом, на первом шаге уничтожаются все коэффициенты, лежащие под первым ведущим элементом a11
0, на втором шаге уничтожаются элементы, лежащие под вторым ведущим элементом а22(1) (если a22(1) 0) и т.д. Продолжая этот процесс и дальше, мы, наконец, на (m-1) шаге приведем исходную систему к треугольной системе.
Если в процессе приведения системы к ступенчатому виду появятся нулевые уравнения, т.е. равенства вида 0=0, их отбрасывают. Если же появится уравнение вида
Если же появится уравнение вида
то это свидетельствует о несовместности системы.
На этом прямой ход метода Гаусса заканчивается.
2. Обратный ход.
На втором этапе осуществляется так называемый обратный ход, суть которого заключается в том, чтобы выразить все получившиеся базисные переменные через небазисные и построить фундаментальную систему решений, либо, если все переменные являются базисными, то выразить в численном виде единственное решение системы линейных уравнений.
Эта процедура начинается с последнего уравнения, из которого выражают соответствующую базисную переменную (она в нем всего одна) и подставляют в предыдущие уравнения, и так далее, поднимаясь по «ступенькам» наверх.
Каждой строчке соответствует ровно одна базисная переменная, поэтому на каждом шаге, кроме последнего (самого верхнего), ситуация в точности повторяет случай последней строки.
Примечание: на практике удобнее работать не с системой, а с расширенной ее матрицей, выполняя все элементарные преобразования над ее строками.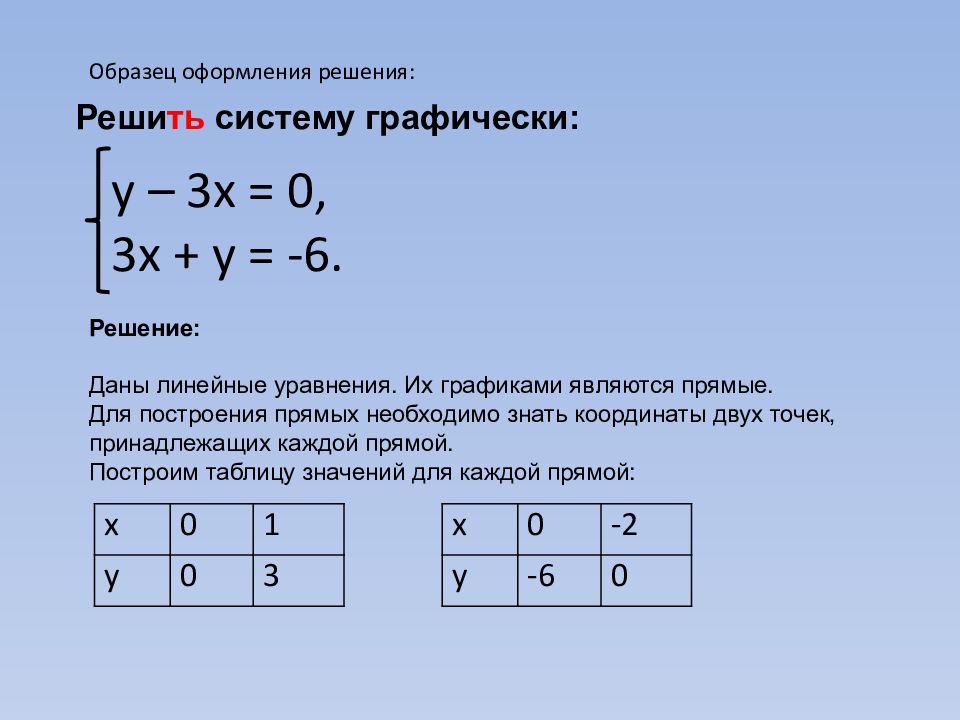 Удобно, чтобы коэффициент a11 был равен 1 (уравнения переставить местами, либо разделить обе части уравнения на a11).
Удобно, чтобы коэффициент a11 был равен 1 (уравнения переставить местами, либо разделить обе части уравнения на a11).
2.2 Примеры решения СЛАУ методом Гаусса
В данном разделе на трех различных примерах покажем, как методом Гаусса можно решить СЛАУ.
Пример 1. Решить СЛАУ 3-го порядка.
Обнулим коэффициенты при
во второй и третьей строчках. Для этого домножим их на 2/3 и 1 соответственно и сложим с первой строкой:
Как решать однородные слау. Что такое однородная система линейных уравнений? Алгоритм решения систем линейных однородных уравнений
Системы линейных уравнений, у которой все свободные члены равны нулю, называются
однородными
:
Любая однородная система всегда совместна, поскольку всегда обладает нулевым
(тривиальным
) решением. Возникает вопрос, при каких условиях однородная система будет иметь нетривиальное решение.
Теорема 5.2.
Однородная система имеет нетривиальное решение тогда и только тогда, когда ранг основной матрицы меньше числа ее неизвестных.
Следствие
. Квадратная однородная система имеет нетривиальное решение тогда и только тогда, когда определитель основной матрицы системы не равен нулю.
Пример 5.6.
Определить значения параметра l, при которых система имеет нетривиальные решения, и найти эти решения:
Решение
. Эта система будет иметь нетривиальное решение тогда, когда определитель основной матрицы равен нулю:
Таким образом, система нетривиальна, когда l=3 или l=2. При l=3 ранг основной матрицы системы равен 1. Тогда оставляя только одно уравнение и полагая, что y
=a
и z
=b
, получим x=b-a
, т.е.
При l=2 ранг основной матрицы системы равен 2. Тогда, выбирая в качестве базисного минор:
получим упрощенную систему
Отсюда находим, что x=z
/4, y=z
/2. Полагая z
=4a
, получим
Множество всех решений однородной системы обладает весьма важным линейным свойством
: если столбцы X
1 и X
2 — решения однородной системы AX = 0
, то всякая их линейная комбинация
aX
1 + bX
2 также будет решением этой системы
. Действительно, поскольку AX
Действительно, поскольку AX
1 = 0
и AX
2 = 0
, то A
(aX
1 + bX
2) = aAX
1 + bAX
2 = a · 0 + b · 0 = 0. Именно вследствие этого свойства, если линейная система имеет более одного решения, то этих решений будет бесконечно много.
Линейно независимые столбцы E
1 , E
2 , E k
, являющиеся решениями однородной системы, называется фундаментальной системой решений
однородной системы линейных уравнений, если общее решение этой системы можно записать в виде линейной комбинации этих столбцов:
Если однородная система имеет n
переменных, а ранг основной матрицы системы равен r
, то k
= n-r
.
Пример 5.7.
Найти фундаментальную систему решений следующей системы линейных уравнений:
Решение
. Найдем ранг основной матрицы системы:
Таким образом, множество решений данной системы уравнений образует линейное подпространство размерности n — r
= 5 — 2 = 3. Выберем в качестве базисного минор
Выберем в качестве базисного минор
Тогда оставляя только базисные уравнения (остальные будут линейной комбинацией этих уравнений) и базисные переменные (осталь-ные, так называемые свободные, переменные переносим вправо), по-лучим упрощенную систему уравнений:
Полагая, x
3 = a
, x
4 = b
, x
5 = c
, находим
Полагая a
= 1, b = c
= 0, получим первое базисное решение; полагая b
= 1, a = c
= 0, получим второе базисное решение; полагая c
= 1, a = b
= 0, получим третье базисное решение. В результате, нормальная фундаментальная система решений примет вид
С использованием фундаментальной системы общее решение однородной системы можно записать в виде
X
= aE
1 + bE
2 + cE
3 . à
Отметим некоторые свойства решений неоднородной системы линейных уравнений AX=B
и их взаимосвязь соответствующей однородной системой уравнений AX = 0.
Общее решение неоднородной системы
равно сумме общего решения соответствующей однородной системы AX = 0 и произвольного частного решения неоднородной системы
. Действительно, пусть Y
Действительно, пусть Y
0 произвольное частное решение неоднородной системы, т.е. AY
0 = B
, и Y
— общее решение неоднородной системы, т.е. AY = B
. Вычитая одно равенство из другого, получим
A
(Y-Y
0) = 0, т.е. Y — Y
0 есть общее решение соответствующей однородной системы AX
=0. Следовательно, Y — Y
0 = X
, или Y = Y
0 + X
. Что и требовалось доказать.
Пусть неоднородная система имеет вид AX = B
1 + B
2 . Тогда общее решение такой системы можно записать в виде X = X
1 + X
2 , где AX
1 = B
1 и AX
2 = B
2 . Это свойство выражает универсальное свойство вообще любых линейных систем (алгебраических, дифференциальных, функциональных и т.д.). В физике это свойство называется принципом суперпозиции
, в электро- и радиотехнике — принципом наложения
. Например, в теории линейных электрических цепей ток в любом контуре может быть получен как алгебраическая сумма токов, вызываемых каждым источником энергии в отдельности.
Линейная система называется однородной
,
если все ее свободные члены равны 0.
В матричном виде однородная система
записывается:
.
Однородная система (2) всегда совместна
.
Очевидно, что набор чисел
,
,
…,
удовлетворяет каждому уравнению
системы. Решение
называетсянулевым
илитривиальным
решением. Таким образом, однородная
система всегда имеет нулевое решение.
При каких условиях однородная
система (2) будет иметь ненулевые
(нетривиальные) решения?
Теорема 1.3
Однородная система
(2)имеет ненулевые решения
тогда
и только тогда, когда рангr
ее основной матрицыменьше числа неизвестныхn
.
Система (2) – неопределенная
.
Следствие 1.
Если число уравненийm
однородной
системы меньше числа переменных
,
то система является неопределенной и
имеет множество ненулевых решений.
Следствие 2.
Квадратная однородная
система
имеет ненулевые решения тогда и тогда,
когда основная матрица этой системывырождена, т.е. определитель
.
В противном случае, если определитель
,
квадратная однородная система имеетединственное
нулевое решение
.
Пусть ранг системы (2)
т. е система (2) имеет нетривиальные
решения.
Пусть
и- частные решения этой системы, т.е.
и
.
Свойства решений однородной
системы
Действительно,
.
Действительно,
.
Объединяя, свойства 1) и 2), можно
сказать, что если
…,
— решения однородной системы (2), то и
всякая их линейная комбинация-
также является ее решением. Здесь
—
произвольные действительные числа.
Можно найти
линейно независимых частных решений
однородной системы (2), с помощью которых
можно получить любое другое частное
решение данной системы, т.е. получить
общее решение системы (2).
Определение 2.2
Совокупность
линейно независимых частных решений
…,
однородной системы (2) таких, что каждое
решение системы (2) можно представить
в виде их линейной комбинации, называетсяфундаментальной системой решений
(ФСР) однородной системы (2).
Пусть
…,
— фундаментальная система решений, тогда
общее решение однородной системы (2)
можно представить в виде:
Где
.
Замечание.
Чтобы получить
ФСР, нужно найти частные решения
…,
,
придавая поочередно какой-либо одной
свободной переменной значение «1», а
всем остальным свободным переменным –
значения «0».
Получим
,,
…,- ФСР.
Пример.
Найти общее решение и
фундаментальную систему решений
однородной системы уравнений:
Решение.
Запишем расширенную
матрицу системы, предварительно поставив
на первое место последнее уравнение
системы, и приведем ее к ступенчатому
виду. Поскольку правые части уравнений
в результате элементарных преобразований
не меняются, оставаясь нулями, столбец
можно не выписывать.
̴
̴
̴
Ранг системы
где
— число переменных. Система неопределенная,
имеет множество решений.
Базисный минор при переменных
отличен
от нуля:
выбираем
в качестве базисных переменных, остальные
— свободные переменные (принимают любые
действительные значения).
Последней в цепочке матрице
соответствует ступенчатая система
уравнений:
(3)
Выразим базисные переменные
через свободные переменные
(обратный ход метода Гаусса).
Из последнего уравнения выразим
:
и подставим в первое уравнение. Получим.
Раскроем скобки, приведем подобные и
выразим:
.
Полагая
,
,
,
где
,
запишем
— общее решение системы.
Найдем фундаментальную систему
решений
,,.
Тогда общее решение однородной системы
можно записать в виде:
Замечание.
ФСР можно было найти
другим путем, без предварительного
отыскания общего решения системы. Для
этого полученную ступенчатую систему
(3) нужно было решить трижды, полагая
для:
;
для:
;
для:
.
Однородная
система
всегда совместна и имеет тривиальное
решение
.
Для существования нетривиального
решения необходимо, чтобы ранг матрицыбыл меньше числа неизвестных:
.
Фундаментальной
системой решений
однородной системы
называют систему решений в виде
векторов-столбцов
,
которые соответствуют каноническому
базису, т.е. базису, в котором произвольные
постоянные
поочередно полагаются равными единице,
тогда как остальные приравниваются
нулю.
Тогда
общее решение однородной системы имеет
вид:
где
— произвольные постоянные. Другими
словами, общее решение есть линейная
комбинация фундаментальной системы
решений.
Таким
образом, базисные решения могут быть
получены из общего решения, если свободным
неизвестным поочередно придавать
значение единицы, полагая все остальные
равные нулю.
Пример
.
Найдем решение системы
Примем
,
тогда получим решение в виде:
Построим
теперь фундаментальную систему решений:
.
Общее
решение запишется в виде:
Решения
системы однородных линейных уравнений
имеют свойства:
Другими
словами, любая линейная комбинация
решений однородной системы есть опять
решение.
Решение систем линейных уравнений методом Гаусса
Решение
систем линейных уравнений интересует
математиков несколько столетий. Первые
результаты были получены в XVIII
веке. В 1750 г. Г.Крамер (1704 –1752) опубликовал
свои труды по детерминантам квадратных
матриц и предложил алгоритм нахождения
обратной матрицы. В 1809 г. Гаусс изложил
новый метод решения, известный как метод
исключения.
Метод
Гаусса, или метод последовательного
исключения неизвестных, заключается в
том, что с помощью элементарных
преобразований система уравнений
приводится к равносильной системе
ступенчатого (или треугольного) вида.
Такие системы позволяют последовательно
находить все неизвестные в определенном
порядке.
Предположим,
что в системе (1)
(что всегда возможно).
(1)
Умножая
поочередно первое уравнение на так
называемые подходящие
числа
и
складывая результат умножения с
соответствующими уравнениями системы,
мы получим эквивалентную систему, в
которой во всех уравнениях, кроме
первого, будет отсутствовать неизвестная
х
1
(2)
Умножим
теперь второе уравнение системы (2) на
подходящие числа, полагая, что
,
и
складывая его с нижестоящими, исключим
переменную
из всех уравнений, начиная с третьего.
Продолжая
этот процесс, после
шага мы получим:
(3)
Если
хотя бы одно из чисел
не равно нулю, то соответствующее
равенство противоречиво и система (1)
несовместна. Обратно, для любой совместной
системы числа
равны нулю. Число- это ни что иное, как ранг матрицы системы
(1).
Переход
от системы (1) к (3) называется прямым
ходом
метода Гаусса, а нахождение неизвестных
из (3) – обратным
ходом
.
Замечание
:
Преобразования удобнее производить не
с самими уравнениями, а с расширенной
матрицей системы (1).
Пример
.
Найдем решение системы
.
Запишем
расширенную матрицу системы:
.
Прибавим к строкам
2,3,4 первую, умноженную на (-2), (-3), (-2)
соответственно:
.
Поменяем
строки 2 и 3 местами, затем в получившейся
матрице добавим к строке 4 строку 2,
умноженную на
:
.
Прибавим
к строке 4 строку 3, умноженную на
:
.
Очевидно,
что
,
следовательно, система совместна. Из
полученной системы уравнений
находим
решение обратной подстановкой:
,
,
,
.
Пример
2.
Найти
решение системы:
.
Очевидно,
что система несовместна, т.к.
,
а
.
Достоинства
метода Гаусса
:
Менее
трудоемкий, чем метод Крамера.
Однозначно
устанавливает совместность системы и
позволяет найти решение.
Дает
возможность определить ранг любых
матриц.
Пример 1
. Найти общее решение и какую-нибудь фундаментальную систему решений для системы
Решение
находим с помощью калькулятора . Алгоритм решения такой же, как и для систем линейных неоднородных уравнений.
Оперируя только со строками, находим ранг матрицы, базисный минор; объявляем зависимые и свободные неизвестные и находим общее решение.
Первая и вторая строки пропорциональны, одну из них вычеркнем:
.
Зависимые переменные – x 2 , x 3 , x 5 , свободные – x 1 , x 4 . Из первого уравнения 10x 5 = 0 находим x 5 = 0, тогда
; .
Общее решение имеет вид:
Находим фундаментальную систему решений, которая состоит из (n-r) решений. В нашем случае n=5, r=3, следовательно, фундаментальная система решений состоит из двух решений, причем эти решения должны быть линейно независимыми. Чтобы строки были линейно независимыми, необходимо и достаточно, чтобы ранг матрицы, составленной из элементов строк, был равен количеству строк, то есть 2. Достаточно придать свободным неизвестным x 1 и x 4 значения из строк определителя второго порядка, отличного от нуля, и подсчитать x 2 , x 3 , x 5 . Простейшим определителем, отличным от нуля, является .
Таким образом, первое решение: , второе – .
Эти два решения составляют фундаментальную систему решений. Заметим, что фундаментальная система не единственна (определителей, отличных от нуля, можно составить сколько угодно).
Пример 2
. Найти общее решение и фундаментальную систему решений системы
Решение.
,
отсюда следует, что ранг матрицы равен 3 и равен числу неизвестных. Значит, система не имеет свободных неизвестных, а поэтому имеет единственное решение – тривиальное.
Задание
. Исследовать и решить систему линейных уравнений.
Пример 4
Задание
. Найти общее и частное решения каждой системы.
Решение.
Выпишем основную матрицу системы:
| 5 | -2 | 9 | -4 | -1 |
| 1 | 4 | 2 | 2 | -5 |
| 6 | 2 | 11 | -2 | -6 |
| x 1 | x 2 | x 3 | x 4 | x 5 |
Приведем матрицу к треугольному виду. Будем работать только со строками, так как умножение строки матрицы на число, отличное от нуля, и прибавление к другой строке для системы означает умножение уравнения на это же число и сложение с другим уравнением, что не меняет решения системы.
Умножим 2-ую строку на (-5). Добавим 2-ую строку к 1-ой:
| 0 | -22 | -1 | -14 | 24 |
| 1 | 4 | 2 | 2 | -5 |
| 6 | 2 | 11 | -2 | -6 |
Умножим 2-ую строку на (6). Умножим 3-ую строку на (-1). Добавим 3-ую строку к 2-ой:
Найдем ранг матрицы.
| 0 | 22 | 1 | 14 | -24 |
| 6 | 2 | 11 | -2 | -6 |
| x 1 | x 2 | x 3 | x 4 | x 5 |
Выделенный минор имеет наивысший порядок (из возможных миноров) и отличен от нуля (он равен произведению элементов, стоящих на обратной диагонали), следовательно rang(A) = 2.
Этот минор является базисным. В него вошли коэффициенты при неизвестных x 1 ,x 2 , значит, неизвестные x 1 ,x 2 – зависимые (базисные), а x 3 ,x 4 ,x 5 – свободные.
Преобразуем матрицу, оставляя слева только базисный минор.
| 0 | 22 | 14 | -1 | -24 |
| 6 | 2 | -2 | -11 | -6 |
| x 1 | x 2 | x 4 | x 3 | x 5 |
Система с коэффициентами этой матрицы эквивалентна исходной системе и имеет вид:
22x 2 = 14x 4 — x 3 — 24x 5
6x 1 + 2x 2 = — 2x 4 — 11x 3 — 6x 5
Методом исключения неизвестных находим нетривиальное решение
:
Получили соотношения, выражающие зависимые переменные x 1 ,x 2 через свободные x 3 ,x 4 ,x 5 , то есть нашли общее решение
:
x 2 = 0.64x 4 — 0.0455x 3 — 1.09x 5
x 1 = — 0.55x 4 — 1.82x 3 — 0.64x 5
Находим фундаментальную систему решений, которая состоит из (n-r) решений.
В нашем случае n=5, r=2, следовательно, фундаментальная система решений состоит из 3-х решений, причем эти решения должны быть линейно независимыми.
Чтобы строки были линейно независимыми, необходимо и достаточно, чтобы ранг матрицы, составленной из элементов строк, был равен количеству строк, то есть 3.
Достаточно придать свободным неизвестным x 3 ,x 4 ,x 5 значения из строк определителя 3-го порядка, отличного от нуля, и подсчитать x 1 ,x 2 .
Простейшим определителем, отличным от нуля, является единичная матрица.
Задача
. Найти фундаментальный набор решений однородной системы линейных уравнений.
Линейное уравнение называется однородным
, если его свободный член равен нулю, и неоднородным в противном случае. Система, состоящая из однородных уравнений, называется однородной и имеет общий вид:
Очевидно, что всякая однородная система совместна и имеет нулевое (тривиальное) решение. Поэтому применительно к однородным системам линейных уравнений часто приходится искать ответ на вопрос о существовании ненулевых решений. Ответ на этот вопрос можно сформулировать в виде следующей теоремы.
Теорема
.
Однородная система линейных уравнений имеет ненулевое решение тогда и только тогда, когда ее ранг меньше числа неизвестных
.
Доказательство
:
Допустим, система, ранг которой равен, имеет ненулевое решение. Очевидно, что не превосходит . В случае система имеет единственное решение. Поскольку система однородных линейных уравнений всегда имеет нулевое решение, то именно нулевое решение и будет этим единственным решением. Таким образом, ненулевые решения возможны только при .
Следствие 1
:
Однородная система уравнений, в которой число уравнений меньше числа неизвестных, всегда имеет ненулевое решение.
Доказательство
:
Если у системы уравнений , то ранг системы не превышает числа уравнений , т.е. . Таким образом, выполняется условие и, значит, система имеет ненулевое решение.
Следствие 2
:
Однородная система уравнений с неизвестными имеет ненулевое решение тогда и только тогда, когда ее определитель равен нулю.
Доказательство
:
Допустим, система линейных однородных уравнений, матрица которой с определителем , имеет ненулевое решение. Тогда по доказанной теореме , а это значит, что матрица вырожденная, т.е. .
Теорема Кронекера-Капелли:
СЛУ совместна тогда и только тогда, когда ранг матрицы системы равен рангу расширенной матрицы этой системы. Система ур-ий называется совместной, если она имеет хотя бы одно решение.
Однородная система линейных алгебраических уравнений
.
Система m линейных ур-ий с n переменными называется системой линейных однородных уравнений, если все свободные члены равны 0. Система линейных однородных ур-ий всегда совместна, т.к. она всегда имеет, по крайней мере, нулевое решение. Система линейных однородных ур-ий имеет ненулевое решение тогда и только тогда, когда ранг её матрицы коэффициентов при переменных меньше числа переменных, т.е. при rang A (n. Всякая лин. комбинация
решений системы лин. однородн. ур-ий также является решением этой системы.
Система лин.независимых решений е1, е2,…,еk называется фундаментальной, если каждое решение системы является линейной комбинацией решений. Теорема: если ранг r матрицы коэффициентов при переменных системы линейных однородных уравнений меньше числа переменных n, то всякая фундаментальная система решений системы состоит из n-r решений. Поэтому общее решение системы лин. однордн. ур-ий имеет вид: с1е1+с2е2+…+сkеk, где е1, е2,…, еk – любая фундаментальная система решений, с1, с2,…,сk – произвольные числа и k=n-r. Общее решение системы m линейных ур-ий с n переменными равно сумме
общего решения соответствующей ей системы однородн. линейных ур-ий и произвольного частного решения этой системы.
7.Линейные пространства. Подпространства. Базис, размерность. Линейная оболочка. Линейное пространство называется n-мерным
, если в нем существует система из линейно независимых векторов, а любая система из большего количества векторов линейно зависима. Число называется размерностью (числом измерений)
линейного пространства и обозначается . Другими словами, размерность пространства — это максимальное число линейно независимых векторов этого пространства. Если такое число существует, то пространство называется конечномерным. Если же для любого натурального числа п в пространстве найдется система, состоящая из линейно независимых векторов, то такое пространство называют бесконечномерным (записывают: ). Далее, если не оговорено противное, будут рассматриваться конечномерные пространства.
Базисом n-мерного линейного пространства называется упорядоченная совокупность линейно независимых векторов (базисных векторов
).
Теорема 8.1 о разложении вектора по базису. Если — базис n-мерного линейного пространства , то любой вектор может быть представлен в виде линейной комбинации базисных векторов:
V=v1*e1+v2*e2+…+vn+en
и притом единственным образом, т.е. коэффициенты определяются однозначно.
Другими словами, любой вектор пространства может быть разложен по базису и притом единственным образом.
Действительно, размерность пространства равна . Система векторов линейно независима (это базис). После присоединения к базису любого вектора , получаем линейно зависимую систему (так как это система состоит из векторов n-мерного пространства). По свойству 7 линейно зависимых и линейно независимых векторов получаем заключение теоремы.
Линейное неравенство — Энциклопедия по экономике
Методы принятия решения при нескольких критериях превратились в самостоятельную область исследования совсем недавно, в семидесятых годах нашего века. Мы посвятим этим методам отдельный параграф гл. 6. Заранее отметим, что в качестве математического средства решения многокритериальных проблем используются методы оптимизации (в линейном случае — методы линейного программирования), а также некоторые другие методы (например, для построения множества достижимых значений показателей— методы теории линейных неравенств). [c.61]
Для преодоления этой трудности был предложен альтернативный способ проведения диалога, основанный на построении множества всех достижимых наборов целей. Обозначим через с вектор, описывающий некоторый набор целей (СДГ),. .., AT) . Множество достижимых значений вектора представляется в виде системы линейных неравенств [c.284]
Пусть имеется система линейных неравенств в (k + Л-мерном пространстве Eh+ [c.315]
Недостатком методов представления эффективного множества на основе построения обобщенных множеств достижимости является трудоемкость построения множества G/ в виде (3.25). Для использования методов теории линейных неравенств необходимо иметь ЭВМ с большим объемом оперативной памяти и высоким быстродействием. Впрочем, требования к быстродействию ЭВМ также ограничивают применимость методов представления эффективного множества на основе его точек. Поэтому методы представления эффективного множества, в том числе и на основе G/, разумно использовать для анализа упрощенных математических моделей изучаемой системы, а затем выбранное сочетание критериев уточнить на более подробной и адекватной модели с помощью одной из диалоговых процедур принятия решения. Так, методы представления эффективного множества с помощью построения обобщенного множества достижимости удобно сочетаются с диалоговой процедурой целевого подхода, изложенной выше. [c.318]
Для решения задачи (8)-(10) строим многоугольник решений, определенный системой линейных неравенств (9) и условием неотрицательности переменных (рис. 8.5). [c.133]
При фиксированном f увеличение дисперсий случайных величин a(-.-( j) и bj([c.93]
Точных методов решения целочисленных нелинейных задач в настоящее время нет. Однако нелинейные целочисленные задачи можно свести, к линейным целочисленным [122]. Сведем, например, задачу (4.24) — (4.31) к задаче целочисленного линейного программирования. Для этого любое произведение булевых переменных, входящее в условия задачи, необходимо заменить одной новой булевой переменной, а к системе ограничений экономико-математической модели добавить два линейных неравенства соответственно для каждой вновь вводимой булевой переменной. >В нашем случае [c.193]
Решение этой системы линейных неравенств — это выпуклый [c.22]
Заметим, что линейные неравенства (26)-(27) совпадают с не- [c.35]
Если выпуклый конус задан в виде решений некоторой однородной системы линейных неравенств, то все его ребра в принципе можно найти, например, методом перебора, рассматривая все возможные подсистемы определенного числа линейных уравнений, получающиеся из исходной системы неравенств заменой всех знаков неравенств равенствами (по этому поводу см. [4]). [c.54]
Теперь докажем, что конус М совпадает с множеством нену-Левых решений следующей системы линейных неравенств [c.61]
Число уравнений системы (2.10) равно т. Вследствие линейной независимости произвольного набора из т — 1 векторов, полученного из е1,…, eJ у, eJ+1,…, ет удалением какого-то одного вектора, для отыскания фундаментальной совокупности решений системы неравенств (2.8) достаточно просмотреть ненулевые решения каждой подсистемы из т — 1 уравнений системы (2.10) При этом среди них следует отобрать векторы, удовлетворяющие системе линейных неравенств (2.8). [c.62]
Общее (т. е. произвольное) решение системы линейных неравенств имеет вид линейной комбинации определенной конечной совокупности решений этой системы с неотрицательными коэффициентами (см. [4], с. 243). При этом фундаментальная совокупность решений системы линейных неравенств — это минимальная (по количеству) подобная совокупность решений. [c.62]
Пусть х, х е X, у = f(x), у = /(х ) и f(x) /(х ). На основании доказанного выше совпадения конуса М с множеством ненулевых решений системы линейных неравенств (2.8) включение /( ) — /( ) е М имеет место тогда и только тогда, когда вектор у = f(x) — f(x ) является ненулевым решением системы (2.8), т. е. [c.63]
Так как образующими конуса М являются векторы е1, е2,…, ет, у, то множество ненулевых решений системы линейных неравенств [c.85]
Найдем фундаментальную совокупность решений системы линейных неравенств (3.6). Это должна быть такая система векторов, множество неотрицательных линейных комбинаций которой в точности совпадает с множеством решений системы (3.6). При этом ни один вектор фундаментальной совокупности невозможно представить в виде неотрицательной линейной комбинации остальных векторов этой совокупности. [c.85]
Сначала укажем некоторый набор решений системы линейных неравенств (3.6). Прежде всего, заметим, что каждый единичный орт е пространства Rm при / е 1 В является решением (3.6). Далее, введем векторы [c.85]
Для того чтобы проверить, что указанный набор векторов образует фундаментальную совокупность решений системы (3.6), остается убедиться в том, что система линейных неравенств (3.6) не имеет никаких других (с точностью до положительного множителя) решений, кроме всевозможных неотрицательных линейных комбинаций векторов указанного выше набора. С этой целью наряду с системой (3.6) рассмотрим соответствующую ей систему из т + 1 линейных уравнений [c.86]
Любая подсистема из т — 1 векторов системы е е2,…, ет,у является линейно независимой. Следовательно, искомая фундаментальная совокупность решений системы линейных неравенств (3.6) содержится среди (одномерных) ненулевых решений подсистем из т — 1 уравнений системы линейных уравнений (3.7). [c.86]
Несколько слов о втором случае. Когда Л = / , рассуждения аналогичны, но несколько проще приведенных выше. В этом случае следует рассмотреть систему из т уравнений, которая отличается от (3.7) отсутствием уравнения (е, у) = О, соответствующего единичному орту е. Здесь удалять следует лишь одно уравнение, чтобы получить ту же самую фундаментальную совокупность решений системы линейных неравенств (3.6). [c.87]
Итак, в силу доказанного выше, множество решений системы линейных неравенств (3.6), т. е. конус С (вместе с нулем), совпадает с множеством всех неотрицательных линейных комбинаций векторов а1, а2,…, ар. Поэтому включение z e С для вектора z имеет место тогда и только тогда, когда этот вектор можно представить в виде некоторой ненулевой неотрицательной линейной комбинации векторов указанного набора. [c.87]
Установим совпадение конуса М с множеством ненулевые решений системы линейных неравенств [c.100]
Система (4.4) содержит /и + 1 линейное уравнение, причем любая подсистема из т — 1 векторов набора е s e / /, f , У, у», У, участвующих в образовании этой системы, является линейно независимой. Поэтому для отыскания общего решения системы линейных неравенств (4.3) достаточно просмотреть (одномерные) ненулевые решения всех возможных подсистем системы (4.4), получающихся из (4.4) удалением каких либо двух ее Уравнений. При этом найденные таким способом решения должны Удовлетворять системе неравенств (4.3). [c.101]
Аналогично разбирается случай удаления (т — 1)-го уравнения вместе с одним из уравнений вида es, у) = 0. При этом будет найдено еще одно ненулевое решение у» при 5 = i, удовлетворяющее системе линейных неравенств (4.3). [c.102]
В итоге получаем совокупность векторов е . .., е у, у», е + . .., ет, порождающих конус решений системы линейных неравенств (4.3). Полученная совокупность совпадает с системой векторов, порождающих конус М. Тем самым, установлено, что множество ненулевых решений системы линейных неравенств (4.3) совпадает с конусом М. [c.102]
Конус острый, так как является подмножеством острого конуса К. Докажем совпадение конуса М с множеством ненулевых решений системы линейных неравенств [c.107]
В системе (4.10) /л уравнений. Любая подсистема из т — 1 вектора системы векторов е1,…, ек х, у, ек+],…, ет является линейно независимой. Поэтому для отыскания фундаментальной совокупности решений системы линейных неравенств (4.9) достаточно найти по одному ненулевому решению каждой из подсистем системы (4.10), получающейся из (4.10) удалением какого-то одного из ее уравнений (при этом найденное решение должно удовлетворять системе неравенств (4.9)). [c.107]
Таким образом, одна из фундаментальных совокупностей решений системы линейных неравенств (4.9) имеет вид (4.8). Следовательно, конус М совпадает с множеством ненулевых неотрицательных решений системы линейных неравенств (4.9). [c.108]
А Теорема является следствием предыдущей теоремы и одного утверждения из теории систем линейных неравенств (см. [34], с. 269).v [c.114]
С этой целью найдем общее решение системы линейных неравенств (4.23), рассмотрев соответствующую ей систему линейных уравнений [c.120]
Теперь обсудим, каким образом МДЦ можно использовать при наличии дополнительной информации об относительной важности критериев в случае, когда множество возможных решений состоит из бесконечного числа элементов (например, задано в виде множества решений некоторой системы линейных неравенств). Для иллюстрации сначала рассмотрим самую простую ситуацию, — когда имеется всего три критерия и первый критерий важнее второго с некоторым коэффициентом относительной важности. Будем считать, что другой информации нет, причем получающееся в результате учета этой информации множество парето-оптимальных векторов бесконечно. Спрашивается, каким образом произвести дальнейшее сужение области поиска или же более того — остановить выбор на каком-то одном из возможных векторов С этой целью можно по известной формуле 612/1 + (1 — 0i2)/> пересчитать менее важный второй критерий и, тем самым, образовать новый векторный критерий, в котором первый и третий остались прежними. Именно второй, измененный критерий следует взять в качестве некоординатного и задать определенный ряд его значений для получения соответствующих двумерных сечений. Сравнивая представленные на дисплее сечения, можно получить наглядное представление о структуре множества Парето, соответствующем новому векторному критерию, и попытаться выбрать из этого множества какой-то один определенный (компромиссный) вектор у, у, у )- Этот [c.168]
Фундаментальная совокупность решений однородной системы линейных неравенств 62, 108, 121 [c.173]
Черников С.Н. Линейные неравенства. — М. Наука, 1968. — 352 с. [c.175]
Линейное программирование. Этот метод математического программирования объединяет методы решения задач, которые описываются линейными уравнениями. Если предприятие работает на рынке, близком по свойствам к рынку чистой конкуренции, на котором оно вынуждено продавать товары по неизменной, установившейся независимо от предприятия цене, то между выручкой от реализации, издержками и количеством реализованной продукции может существовать линейная зависимость. Ограничения выпуска продукции по загрузке производственных мощностей выпускаемой продукции могут быть описаны линейными неравенствами. В этом случае составление оптимального по прибыли или выручке от реализации плана производства сводится к решению задачи линейного программирования. [c.112]
Линейным программированием называется раздел математики, в котором изучаются методы нахождения минимума и максимума линейной функции конечного числа переменных при условии, что переменные удовлетворяют конечному числу дополнительных условий, имеющих вид линейных уравнений и линейных неравенств. [c.268]
Линейное программирование имеет дело с оптимизацией моделей, в которых целевая функция линейно зависит от переменных решения и ограничения представляют собой линейные неравенства или уравнения относительно переменных решения. [c.47]
Для построения множества Gf в виде (3.24) предлагается использовать методы теории линейных неравенств, разработка которой, была начата еще в начале XIX века в работах великого французского математика Жана Батиста Фурье. Поскольку эти методы недостаточно известны широкому кругу читателей, дадим общее представление о некоторых идеях этой теоршт. [c.315]
Линейное программирование (linear programming) — раздел математического программирования, посвященный методам решения задач об экстремумах линейных функций на множествах, задаваемых системами линейных неравенств и равенств. Используется менеджерами для принятия решений в ситуациях с ограниченными ресурсами. [c.239]
Линейное программирование (планирование) — математический метод отыскания максимума или минимума линейной функции при наличии ограничений в виде линейных неравенств или уравнений. (Линейное здесь означает, что на графике функции изоб- [c.58]
Множество L всех решений (векторов х Rm) однородного линейного неравенства с, х) = с хх + с2х2 +. .. + стхт 0, где с — фиксированный ненулевой вектор пространства Rm, пред- [c.52]
Если же вместо одного неравенства рассматривать некоторую систему, содержащую определенное конечное число подобного рода неравенств, то множеством решений этой системы однородных линейных неравенств также будет выпуклый конус, представляющий собой пересечение конечного числа замкнутых полупространств. Его называют многогранным (полиэдральным) конусом. В общем случае этот конус не является острым. [c.53]
Поскольку все возможные варианты удаления пар уравнений из системы линейных уравнений (3.7) рассмотрены, то никаких других (с точностью до положительного множителя) решений подсистем из т — 1 уравнений системы (3.7), удовлетворяющих (3.6), не существует. Это означает, что система векторов, составленная из е для всех i е / В и e J для всех / е А и всех j e й, образует фундаментальную совокупность решений системы линейных неравенств (3.6). Следовательно, любое решение системы неравенств (3.6) может быть представлено в виде неот- [c.86]
Итак, фундаментальная совокупность решений системы линейных неравенств (4.23) имеет вид (4.22). Поэтому конус Мдей-ствительно совпадает с множеством ненулевых решений системы линейных неравенств (4.23). [c.121]
Один из наиболее простых способов образования идеального множества восходит к Чарнсу и Куперу и состоит в задании его при помощи линейных неравенств и уравнений [c.163]
В задачах с двумя переменными можно отказаться от перехода от неравенств к уравнениям, так как линейное неравенство o,j ,+ я2х2 [c.198]
5 Решение системы линейных уравнений
Решение системы линейных уравнений
Общая характеристика методов решения систем линейных уравнений
Методы решения систем линейных уравнений в основном делятся на две группы:
1. Точные методы — представляющие собой конечные алгоритмы для вычисления корней системы.
2. Итерационные методы — позволяющие получить корни системы уравнений с заданной точночтью путём бесконечных сходящихся процессов.
Введём следующие обозначения:
— матрица коэффициентов
— столбец свободных членов
— столбец неизвестных
Решение имеет место, если матрица — неособенная, то есть
— решение системы с помощью обратной матрицы
Сложность нахождения обратной матрицы для заключается в большом времени нахождения .
Это обстоятельство обходится с помощью правила Крамера
,
где — определитель матрицы
— определитель матрицы, полученный из матрицы путём замещения -го столбца на столбец свободных членов .
Пример:
Прямой метод
,
По правилу Крамера
Метод Гаусса. Схема единственного деления
Наиболее распространённым приёмом решения системы линейных уравнений является метод Гаусса или метод последовательного исключения неизвестных.
Рассмотрим для простоты систему линейных алгебраических уравнений 4-го порядка:
1. Выбираем ведущий элемент
2. Поделив первое уравнение на , получаем
, (2)
где , ,
3. Исключаем переменную из всех последующих уравнений, начиная со второго, путём вычитания уравнения 2, умноженного на коэффициент, стоящий при в соответствующем уравнении. Получаем
,
где , ,
4. Выбираем ведущий элемент во втором уравнении
и так далее.
Если , то получим систему
, (3)
то есть матрица имеет диагональный вид:
Из системы 3 отыскиваем следующим образом
, (4)
Процесс приведения матрицы к треугольному виду 3 называется прямым ходом, а нахождение корней по 4 обратным ходом.
Пример: прежний, но методом Гаусса. Приводит к системе уравнений:
— прямой ход
— обратный ход
Существует схема единственного деления, которая используется при дирном счёте, но мы либо рассмотрим её на практике, либо вообще не будем рассматривать.
То есть в нашем курсе мы ориентируемся на вычислительную технику и все методы интересуют как алгоритмы.
Трудоёмкость метода Гаусса
1. Прямой ход
2. Обратный ход
Общее число выполняемых арифметических действий
то есть для
Предложенный метод Гаусса ориентирован на то, чтобы ведущие элементы не равнялись 0. А если на каком-то шаге возникает ситуация, что ведущий элемент равен 0, то тогда схема “формально” непригодна, хотя заданная система может иметь единственное решение.
Тогда применяют разновидность метод Гаусса -схема с выбором главного элемента:
Метод Гаусса. Схема с выбором главного элемента
1. Выбираем элемент — наибольший по модулю и неявляющийся свободным членом.
2. Вычисляем коэффициенты
, для всех
-тая строка называется главной строкой.
3. Из каждой неглавной строки вычитаем главную строку, умноженную на . В результате получим матрицу, у которой в -ом столбце все коэффициенты нулевые.
4. Преобразуем матрицу следующим образом: отбрасываем — (главную) строку и -й столбец. Получим матрицу .
5. Делаем подобные преобразования над матрицей до тех пор, пока не получим одну строку из двух столбцов, которая является главной.
6. Для определения . Объединим все главные строки, начиная с последней. После надлежащего изменения неизвестных получается система с треугольной матрицой.
При работе на ЭВМ при вывод главного элемента может оказаться достаточно трудоёмкой задачей. Поэтому практически в качестве главной строки берут первую строку, а в качестве главного элемента — наибольший по модулю элемент этой строки.
Пример:
1 | -0,6 | 3 | 1 | -1 | 2 | 6 | 11 | |
I | 2 | 5 | 1 | 3 | -4 | -12 | -17 | |
3 | -0,4 | 2 | 0 | 1 | -1 | 1 | 3 | |
4 | -0,2 | 1 | -5 | 3 | -3 | 3 | -1 | |
1 | -0,333 | 1,6 | 0,8 | -0,4 | -1,2 | 0,8 | ||
II | 2 | -0,083 | 0,4 | 2,2 | -2,6 | -3,8 | -3,8 | |
3 | -4,8 | 3,6 | -3,8 | 0,6 | -4,4 | |||
III | 1 | 0,571 | 2,0 | -1,665 | -1,0 | -0,665 | ||
2 | 2,5 | -2,915 | -3,75 | -4,165 | ||||
IV | 1 | 0,572 | 1,141 | 1,713 | ||||
V | 1 | 2,0 | 3 | |||||
VI | 1 | 3,0 | 4 | |||||
VII | 1 | -1,0 | 0 | |||||
VIII | 1 | 1,0 | 2 |
Достоинства метода
1. Если матрица вырождения, то перед исключением неизвестной главный элемент считается равным нулю =>
2. С помощью метода Гаусса можно вычислить определитель треугольной матрицы.
При большом числе неизвестных схема метода Гаусса, дающая точное решение, становится весьма сложной.
В этих случаях для нахождения корней системы лучше пользоваться приближёнными численными методами.
Метод итераций
Дана система уравнений
Можно привести систему к такому виду, чтобы диагональные элементы были отличные от нуля, то есть , тогда разрешая -тое уравнение относительно, получаем
, (2)
где , , или при
, .
Тогда систему уравнений 2 можно записать в виде:
— итерационная формула.
Таким образом, выбрав начальные значения
и так далее.
Итерации останавливаются, когда ,
Сходимость метода итераций для решения системы алгебраических уравнений
Теорема: Система уравнений имеет единственное решение и сходится при любом начальном значении тогда и только тогда, когда все собственные значения матрицы по модулю меньше 1.
Если для системы уравнений
выполнено хотя бы одно из условий:
1. ,
2. ,
то процесс итерации сходится, независимо от выбора начального условия.
Однако этой теоремой в общем случае очень тяжело воспользоваться, поэтому на практике пользуются другим правилом менее жёстким.
Если эти условия выполняются, то в принципе логично выбрать для начальных значений. На практике в качестве начального приближения используют вектор свободных членов.
Приведение линейной системы к виду, удобному для итерациию.
Теорема сходимости накладывает жёсткие условия к коэффициентам данной линейной системы.
Однако, если , то эту систему всегда можно привести к такому виду:
, чтобы удовлетворить условиям 1
Первый способ.
Дано:
Домножим это уравнение на матрицу , где
,
где
Второй способ.
Каждое -ое уравнение делится на
Тогда , , .
Тогда уравнение сходимости имеет вид
,
,
Эти неравенствабудут выполняться, если диагональные элементы будут удовлетворять условиям:
, ,
то есть если модули диагональных коэффициентов для которого уравнения системы больше суммы модулей всех остальных коэффициентов.
Достоинства метода итераций
1. Если итерации сходятся быстро, то есть для сходимости требуется менее итераций, то выигрыш во времени по сравнению с методом Гаусса:
, — число итераций
2. Погрешности округления в методе итераций сказывается значительно меньше, чем в методе Гаусса. Кроме того, метод итерации является самоисправляющимся, то есть отдельная ошибка запрещается в вычислениях, не отражаясь на конечном результате, то есть ошибочное приближение можно рассматривать как новый начальный вектор.
3. Метод итераций становится особенно выгодным при решении систем, у которых значительное число коэффициентов равно нулю.
4. Метод итераций легко программируется.
Метод Зейделя
Является модификацией метода итераций. Основная идея заключается в том, что при вычислении -го приближения -го корня используются уже вычисленные приближённые корни .
Дано: ,
Выбираем начальное приближение:
На -том шаге, согласно Зейделю строим приближение по следующим формулам:
1. Метод Зейделя даёт полную сходимость по сравнению с методом итерации, но приводящий к громоздким вычислениям.
2. Теорема: Для существования единственного решения системы сходимости метода Зейделя достаточно выполнение хотя бы одного из двух условий:
1) ,
2) матрица — симметричная положительно определённая (все её соответственно значения положительны)
Решение однородных систем линейных уравнений
Система линейных однородных уравнений (1.61) имеет нетривиальные решения только тогда, когда ее детерминант равен нулю, т. е. [c.20]
Общее решение связанной системы линейных однородных уравнений первого порядка, представленной уравнением (1П.6А.З), имеет вид [c.43]
Решение однородных систем линейных уравнений. Системы уравнений вида [c.299]
Система уравнений называется совместной, если существует хотя бы одно решение. Однородные системы линейных уравнений всегда совместны, так как нулевые значения неизвестных для них являются решением. Совместность неоднородной системы линейных уравнений устанавливается теоремой Кронекера—Капелли [261. [c.247]
Базисные решения однородной системы линейных уравнений (3.5.2) получили название базисных маршрутов химического превращения, а соответствующие им итоговые реакции — реакций по маршрутам [50—54]. Числа 6 р называют стехиометрическими числами стадий в реакциях по маршрутам [50]. [c.166]
Как уже отмечалось (стр. 247), однородная система линейных уравнений имеет ненулевое решение лишь в случае, когда ее определитель равен нулю. Таким образом, ненулевое решение системы (10 — 80) возможно при условии [c.281]
Получим формулу для общего решения системы (54). Вывод этой формулы аналогичен выводу формулы общего решения для системы линейных дифференциальных уравнений Пусть а = является матрицей фундаментальных решений однородной системы линейных разностных уравнений [c.233]
Чтобы эта однородная система линейных уравнений имела нетривиальные решения относительно амплитуд 1 , необходимо и достаточно, чтобы ее определитель равнялся нулю, т. е. [c.183]
При этом матрица Г определяется (вообще говоря, неоднозначно) согласно изложенному в 1, гл. 2, ч. I следующим образом ее столбцы суть линейно-независимые решения Х[c.332]
Применяя метод, основанный на линеаризации, мы для описания перехода из одного состояния в другое не используем дифференциальное уравнение (2) разд. 27. Вместо этого пользуемся линеаризованным вариантом уравнения (2) разд. 27 в интегральной форме, а именно уравнением (2) разд. 28. В частности, подобный переход описывает уравнение (5) настоящего раздела. В результате такой линеаризации решение однородной части линеаризованного уравнения (2) разд. 27, а именно величины 6,, оказывается полностью не зависимым от г/ , соответствующих управляющим воздействиям. Именно по этой причине в случае линейной системы состояние системы может быть описано при помощи к фазовых переменных вместо N фазовых переменных. Как следует из равенства (6) разд. 28, при определении 6, используется начальное условие Х1 0) = с,. При решении уравнений, описывающих процесс, приходится иметь дело с двумя интегральными членами. Первый интегральный член представляет собой функцию управляющих воздействий, а именно [c.248]
В дискретных системах аналогичный вопрос был тривиальным, он сводился к решению системы линейных уравнений. Теперь же мы имеем дело не с конечными совокупностями величин, а с функцией. При этом появляются бесконечности двоякого рода бесконечное число значений х и бесконечное число членов ряда. Поэтому поставленный вопрос является трудным. Мы еще вернемся к нему, а пока заметим, что в частном случае, когда мы можем написать функции [c.385]
Решение системы линейных однородных уравнений Гиббса — Дюгема совместно с уравнениями (5.10), (5.38), (5.41) и (5.43) с учетом [c.87]
После подстановки подобных выражений в уравнение переноса получают однородную линейную систему дифференциальных уравнений для возмущений. Решение этой системы записывается как суперпозиция гармонических волн различных частот V. Тогда, например, возмущение плотности имеет вид [c.31]
Задача состоит в нахождении решения системы (XI,56). Будем временно считать ее правую часть известной функцией I. Тогда система (XI,56) станет неоднородной системой линейных дифференциальных уравнений. Соответствующая ей однородная система будет [c.240]
Получена система двух однородных линейных уравнений с двумя неизвестными г/ и ф. Критическое значение ш должно допускать отличные от нуля решения этой системы. Для этого необходимо, чтобы определитель системы был равен нулю [c.220]
Эта система линейных однородных ( вековых ) уравнений имеет нетривиальное решение для сд и Св только в том случае, ес- [c.78]
Система (11,7) есть система линейных однородных алгебраических уравнений для нахождения коэффициентов с . Она имеет нетривиальное решение (не все сл равны нулю), если детерминант, построенный из коэффициентов этих уравнений, равен нулю, т. е. [c.30]
Задача состоит в нахождении коэффициентов Ср, при АО и энергии Ех МО, определяемых решением системы линейных однородных уравнений [c.213]
Применение преобразования Лапласа к системе линейных однородных дифференциальных уравнений с постоянными коэффициентами превращает последнюю в систему линейных алгебраических уравнений. В качестве примера ниже приводится решение системы (У.Зб). Чтобы избежать громоздких выражений, введены обозначения [c.247]
Пример 10. При проектировании ректификационных установок определение таких технологических параметров, как флегмовое число,число тарелок, положение тарелки питания, производится по некоторым критериям путем проведения многократнйгх расчетов с использованием определенной стратегии (см. с. 146). Процесс итеративного поиска этих параметров, как правило, приводит к существенным затратам машинного времени. Решение этой задачи более эффективно с использованием метода квазилинеаризации. В этом случае для описания ректификационной колонны используется система разностных уравнений с граничными условиями, решение которой возможно приведением ее к линейному виду и определением частного и однородных решений. При этом одной из переменных является и флегмовое число. Таким образом, удается исключить итерации по флегмовому числу, определяя его совместно с другими переменными задачи [18]. [c.61]
Действительно, если бы имело место равенство 5 = Р, то (У.130) представляло бы собой 5 однородных линейных уравнений с 5 неизвестными величинами. Так как все уравнения линейно независимы, то определитель 1 I этой системы уравнений не равен нулю. Но такая система уравнений, как известно из линейной алгебры, имеет только тривиальное решение VI = V2 =. .. = = 0. Это значит,, что составление итогового уравнения, не содержащего активных промежуточных частиц, невозможно. В то же время хотя бы одно такое уравнение, описывающее итог сложного химического процесса, должно существовать. Поэтому 8 > Р. [c.291]
В первом уравнении (106) перейдем к новой переменной = йР/йз. Тогда ненулевое решение линейной однородной системы (106) задается одним из дифференциальных уравнений [c.182]
Система уравнений (29,2) является бесконечной системой однородных линейных уравнений относительно неизвестных функций ( 1 ). Чтобы эта система имела отличные от нуля решения, необходимо обращение в нуль детерминанта, составленного из коэффициентов этой системы уравнений, т. е. [c.139]
Система уравнений в вариациях. как система линейных однородных уравнений обладает важным свойством, а именно сумма любых двух ее решений, найденных при неодинаковых начальных условиях, также является решением. Таким образом, если начальное условие [c.317]
Система (VII, 45) представляет собой однородную систему линейных дифференциальных уравнений с переменными коэффициентами. Вследствие однородности общее решение этой системы находится с точностью до произвольного постоянного множителя. В частном случае, когда данный множитель принимается равным нулю, получается тривиальное (нулевое) решение. [c.321]
При гармоническом входном воздействии (2.81) согласно решению (2.50) уравнения (2.37) в отклике элемента или системы можно выделить две составляющие. Одна из них усв (0. определяемая общим решением однородного дифференциального уравнения, описывает свободное движение, возникающее в элементе или системе после приложения гармонического входного воздействия. Вторая составляющая (t) описывает вынужденное движение элемента или системы, которое определяется частным решением уравнения (2.37) и вследствие линейности уравнения (2.37) будет гармонической, но в общем случае отличающейся от входного гармонического сигнала по амплитуде и фазе [c.51]
Система уравнений (11) есть система линейных однородных уравнений относительно неизвестных с . Она имеет нетривиальные решения только тогда, когда ее определитель из коэффициентов перед неизвестными обращается в нуль [c.148]
Уравнения (11) не являются линейными уравнениями относительно неизвестных Однако если в матричных элементах использовать некоторое начальное приближение для этих коэффициентов, а, следовательно, и для величин , то далее можно решить систему линейных однородных уравнений (11), найти новые коэффициенты и порядки связей и повторять этот цикл до тех пор, пока не будет достигнута сходимость (если она будет иметь место). Для того же чтобы система (11) имела нетривиальные решения, необходимо, чтобы ее определитель обращался в нуль [c.297]
Всего имеется 2″ уравнений вида (2.58), содержащих 2″ неизвестных коэффициентов си. Указанная система линейных однородных -уравнений имеет нетривиальное решение только в том случае, если выполняется условие [c.51]
Это — система линейных однородных алгебраических уравнений относительно величин, стоящих в скобках, и если определитель ее не равен нулю, то система имеет только тривиальное решение [c.204]
Сначала рассмотрим решение наиболее простой линейно однородной системы уравнений (7-39). Эта система содержит п неизвестных и состоит из четырех уравнений. [c.90]
Чтобы получить ненулевые решения линейной однородной системы уравнений, следует приравнять нулю ее определитель [c.136]
Для решения линейной системы разностных уравнений первого порядка можно воспользоваться формулами (7.29), т. е. искать его как комбинацию частного и однородных решений. При этом константы I определяются в результате решения системы линейных уравнений, образованной граничными условиями (7.33)—(7.36). Хотя количество дистиллята — переменная величина, определяемая в процессе расчета, для каждой последующей итерации эта величина является константой, вычисленной по результатам предыдущей итерации. Для этого необходимо решать на каждой итерации уравнение с одной неизвестной, например, методом Вегстейна. Этим самьт удается свести задачу поиска коэффициентов а,- к решению системы линейных алгебраических уравнений. Заметим, что в формулах (7.29) конечное значение индексов суммирования равно количеству недостающих начальных условий. [c.279]
Процесс итеративного поиска этих параметров, как правило, приводит к существенным зат4затам машинного времени. Решение этой задачи более эффективно с использованием метода квазилинеаризации. В этом случае для описания ректификационной колонны используется система разностных уравнений с граничными условиями, решение которой возможно путем приведения ее к линейному виду и определения частного и однородных решений. При этом одной из переменных является и флегмовое число.Таким образом, удается исключить итерации по флегмовому числу, определяя его совместно с другими переменными задачи [20]. [c.277]
Для полной колонны расчет состава продуктов и определение числа тарелок вверху (ЯО и внизу N2) колонны рекомендуется проводить, используя определители системы уравнений (6.33) и (6.34) [18]. Если указанную систему уравнений решать одновременно с уравнениями материального баланса верхней или нижней частей колонны и комбинировать уравнения (6.33) и (6.34), то каждый раз будут получаться системы однородных линейных уравнений. Так как на тарелке питания и Х1м, ф О, то для получения нетривиальных решений определители данной системы должны быть равны нулю. Например, для трехкомпонентной смеси при паровом питании = 21) можно написать три определителя [c.308]
Общее решение системы уравнений
В ваших классах алгебры, если система уравнений имеет бесконечно много решений, вы просто напишете «бесконечно много решений» и перейдете к следующей задаче. Однако когда мы говорим «бесконечно много решений», происходит гораздо больше. В этой статье мы рассмотрим эту идею с общими решениями.
реклама
Содержание:
- Написание общего решения
- Нахождение конкретных решений на основе общего решения
- Краткое описание шагов
Выписка общего решения
Во-первых, давайте рассмотрим, как записать общее решение данной системы уравнений.Для этого рассмотрим пример.
Пример
Найдите общее решение системы уравнений:
\ (
\ begin {array} {c}
x_1 + 2x_2 + 8x_3 + 18x_4 = 11 \\
x_1 + x_2 + 5x_3 + 11x_4 = 10 \\
\ end {array} \)
Как и в любой системе уравнений, мы будем использовать расширенную матрицу и сокращение строки.
\ (
\ left [
\ begin {array} {cccc | c}
1 & 2 & 8 & 18 & 11 \\
1 & 1 & 5 & 11 & 10 \\
\ end {array}
\ right ]
\ sim
\ left [
\ begin {array} {cccc | c}
1 & 0 & 2 & 4 & 9 \\
0 & 1 & 3 & 7 & 1 \\
\ end {array}
\ right]
\)
Теперь запишите уравнения из этой сокращенной матрицы.
\ (
\ begin {array} {c}
x_1 + 2x_3 + 4x_4 = 9 \\
x_2 + 3x_3 + 7x_4 = 1 \\
\ end {array} \)
Обратите внимание на матрицу, что ведущие единицы (первая ненулевая запись в каждой строке) находятся в столбцах для \ (x_1 \) и \ (x_2 \).
Найдите эти переменные.
\ (
\ begin {array} {c}
x_1 = 9 — 2x_3 — 4x_4 \\
x_2 = 1 — 3x_3 — 7x_4 \\
\ end {array} \)
Остальные переменные — это свободных переменных , что означает, что они могут принимать любое значение.Значения \ (x_1 \) и \ (x_2 \) основаны на значениях этих двух переменных. В общем решении вы хотите это отметить.
Общее решение:
\ (
\ boxed {
\ begin {array} {l}
x_1 = 9 — 2x_3 — 4x_4 \\
x_2 = 1 — 3x_3 — 7x_4 \\
x_3 \ text {is free} \\
x_4 \ text { бесплатно} \\
\ end {array}
}
\)
Существует бесконечно много решений этой системы уравнений, все из которых используют разные значения двух свободных переменных.
Поиск конкретных решений
Предположим, вы хотите привести пример конкретного решения системы уравнений выше. Их бесконечно много, так что у вас есть большой выбор! Вам просто нужно рассмотреть возможные значения свободных переменных.
Пример решения
Лет:
\ (
\ begin {array} {l}
x_3 = 0 \\
x_4 = 1 \\
\ end {array}
\)
Не было особой причины выбирать 0 и 1. Опять же, это будет работать для ЛЮБОГО значения, которое вы выберете для этих двух переменных.
Используя эти значения, решение:
\ (
\ begin {array} {l}
x_1 = 9 — 2x_3 — 4x_4 = 9 — 2 (0) — 4 (1) \\
x_2 = 1 — 3x_3 — 7x_4 = 1 — 3 (0) — 7 (1) \\
x_3 = 0 \\
x_4 = 1 \\
\ end {array}
\ rightarrow
\ boxed {
\ begin {array} {l}
x_1 = 5 \\
x_2 = -6 \\
x_3 = 0 \\
x_4 = 1 \\
\ end {array}
}
\)
Чтобы убедиться, вы можете проверить эти значения в исходной системе уравнений:
\ (
\ begin {array} {l}
x_1 + 2x_2 + 8x_3 + 18x_4 = 11 \\
x_1 + x_2 + 5x_3 + 11x_4 = 10 \\
\ end {array}
\ rightarrow
\ begin {array} {l}
(5) + 2 (-6) + 8 (0) + 18 (1) = 11 \ text {(true)} \\
(5) + (-6) + 5 (0) +11 (1) = 10 \ text {(true)} \\
\ end {array}
\)
Поскольку оба уравнения верны для этих значений, мы знаем, что нашли одно из многих, многих решений.Если бы мы хотели найти больше решений, мы могли бы просто выбрать разные значения для двух свободных переменных \ (x_1 \) и \ (x_2 \).
объявление
Краткое описание шагов
Для данной системы уравнений шаги для написания общего решения следующие:
- Строка уменьшения расширенной матрицы для системы.
- Запишите уравнения матрицы с сокращенной строкой.
- Найдите переменные, у которых есть ведущая в столбце.
- Обозначьте остальные переменные как свободные.
Подпишитесь на нашу рассылку!
Мы постоянно публикуем новые бесплатные уроки и добавляем новые учебные пособия, руководства по калькуляторам и пакеты задач.
Подпишитесь, чтобы получать электронные письма (раз в пару или три недели) с информацией о новинках!
Связанные
5.9: Общее решение линейной системы
Цели обучения
- Используйте линейные преобразования, чтобы найти частное решение и общее решение системы уравнений.
- Найдите ядро линейного преобразования.
Напомним определение линейного преобразования, обсуждавшееся выше. \ (T \) является линейным преобразованием , если всякий раз, когда \ (\ vec {x}, \ vec {y} \) — векторы, а \ (k, p \) — скаляры, \ [T \ left (k \ vec {x} + p \ vec {y} \ right) = k T \ left (\ vec {x} \ right) + p T \ left (\ vec {y} \ right) \] Таким образом, линейные преобразования распределяются по сложению и передать скаляры наружу.
Оказывается, мы можем использовать линейные преобразования для решения линейных систем уравнений.Действительно, учитывая систему линейных уравнений вида \ (A \ vec {x} = \ vec {b} \), это можно перефразировать как \ (T (\ vec {x}) = \ vec {b} \) где \ (T \) — линейное преобразование \ (T_A \), индуцированное матрицей коэффициентов \ (A \). Имея это в виду, рассмотрим следующее определение.
Определение \ (\ PageIndex {1} \): частное решение системы уравнений
Предположим, что линейная система уравнений может быть записана в виде \ [T \ left (\ vec {x} \ right) = \ vec {b} \] Если \ (T \ left (\ vec {x} _ {p } \ right) = \ vec {b}, \) то \ (\ vec {x} _ {p} \) называется частным решением линейной системы.
Напомним, что система называется однородной, если каждое уравнение в системе равно \ (0 \). Предположим, мы представляем однородную систему уравнений как \ (T \ left (\ vec {x} \ right) = 0 \). Оказывается, \ (\ vec {x} \), для которого \ (T \ left (\ vec {x} \ right) = 0 \) являются частью специального набора, называемого нулевым пространством \ (T \). Мы также можем называть пустое пространство ядром \ (T \) и писать \ (ker \ left (T \ right) \).
Рассмотрим следующее определение.
Определение \ (\ PageIndex {2} \): пустое пространство или ядро линейного преобразования
Пусть \ (T \) — линейное преобразование. Определите \ [\ ker \ left (T \ right) = \ left \ {\ vec {x}: T \ left (\ vec {x} \ right) = \ vec {0} \ right \} \] Ядро, \ (\ ker \ left (T \ right) \) состоит из множества всех векторов \ (\ vec {x} \), для которых \ (T (\ vec {x}) = \ vec {0} \). Это также называется пустым пространством \ (T \).
Мы также можем называть ядро \ (T \) пространством решений уравнения \ (T \ left (\ vec {x} \ right) = \ vec {0} \).
Рассмотрим следующий пример.
Пример \ (\ PageIndex {1} \): ядро производной
Пусть \ (\ frac {d} {dx} \) обозначает линейное преобразование, определенное на \ (f, \) функций, которые определены на \ (\ mathbb {R} \) и имеют непрерывную производную. Найдите \ (\ ker \ left (\ frac {d} {dx} \ right). \)
Решение
В примере запрашиваются функции \ (f \), свойство которых \ (\ frac {df} {dx} = 0. \) Как вы, возможно, знаете из исчисления, эти функции являются постоянными функциями.Таким образом, \ (\ ker \ left (\ frac {d} {dx} \ right) \) — это набор постоянных функций.
Определение [def: nullspaceoflineartransformation] утверждает, что \ (\ ker \ left (T \ right) \) — это множество решений уравнения, \ [T \ left (\ vec {x} \ right) = \ vec {0 } \] Поскольку мы можем записать \ (T \ left (\ vec {x} \ right) \) как \ (A \ vec {x} \), вы уже довольно давно решаете такие уравнения.
Мы потратили много времени на поиск решений систем уравнений в целом, а также однородных систем.Предположим, мы рассматриваем систему, заданную формулой \ (A \ vec {x} = \ vec {b} \), и рассматриваем связанную однородную систему. Под этим мы подразумеваем, что мы заменяем \ (\ vec {b} \) на \ (\ vec {0} \) и смотрим на \ (A \ vec {x} = \ vec {0} \). Оказывается, существует очень важная взаимосвязь между решениями исходной системы и решениями связанной однородной системы. В следующей теореме мы используем линейные преобразования для обозначения системы уравнений. Помните, что \ (T \ left (\ vec {x} \ right) = A \ vec {x} \).
Теорема \ (\ PageIndex {1} \): частное решение и общее решение
Предположим, что \ (\ vec {x} _ {p} \) является решением линейной системы, заданной формулой \ [T \ left (\ vec {x} \ right) = \ vec {b} \] Тогда, если \ (\ vec {y} \) — любое другое решение \ (T \ left (\ vec {x} \ right) = \ vec {b} \), существует \ (\ vec {x} _0 \ in \ ker \ left (T \ right) \) такая, что \ [\ vec {y} = \ vec {x} _ {p} + \ vec {x} _0 \] Следовательно, каждое решение линейной системы может быть записано как сумма частного решения \ (\ vec {x} _p \) и решения \ (\ vec {x} _0 \) связанной однородной системы, заданной как \ (T \ left (\ vec {x} \ right ) = \ vec {0} \).
- Проба
Рассмотрим \ (\ vec {y} — \ vec {x} _ {p} = \ vec {y} + \ left (-1 \ right) \ vec {x} _ {p}. \) Тогда \ (T \ left (\ vec {y} — \ vec {x} _ {p} \ right) = T \ left (\ vec {y} \ right) -T \ left (\ vec {x} _ {p} \ right ) \). Поскольку \ (\ vec {y} \) и \ (\ vec {x} _ {p} \) являются решениями системы, отсюда следует, что \ (T \ left (\ vec {y} \ right) = \ vec {b} \) и \ (T \ left (\ vec {x} _p \ right) = \ vec {b} \).
Следовательно, \ (T \ left (\ vec {y} \ right) -T \ left (\ vec {x} _ {p} \ right) = \ vec {b} — \ vec {b} = \ vec { 0} \).Пусть \ (\ vec {x} _0 = \ vec {y} — \ vec {x} _ {p} \). Тогда \ (T \ left (\ vec {x} _0 \ right) = \ vec {0} \), поэтому \ (\ vec {x} _0 \) является решением связанной однородной системы и поэтому находится в \ ( \ ker \ left (T \ right) \).
Иногда люди вспоминают приведенную выше теорему в следующем виде. Решения системы \ (T \ left (\ vec {x} \ right) = \ vec {b} \) даются как \ (\ vec {x} _ {p} + \ ker \ left (T \ right ) \) где \ (\ vec {x} _ {p} \) — частное решение \ (T \ left (\ vec {x} \ right) = \ vec {b} \).
Пока мы говорили о ядре или нулевом пространстве линейного преобразования \ (T \).Однако мы знаем, что каждое линейное преобразование \ (T \) определяется некоторой матрицей \ (A \). Следовательно, мы можем также говорить о нулевом пространстве матрицы. Рассмотрим следующий пример.
Пример \ (\ PageIndex {2} \): пустое пространство матрицы
Пусть \ [A = \ left (\ begin {array} {rrrr} 1 & 2 & 3 & 0 \\ 2 & 1 & 1 & 2 \\ 4 & 5 & 7 & 2 \ end {array} \ right) \] Найдите \ (\ mathrm {null} \ left (A \ right) \). Точно так же найдите решения системы уравнений \ (A \ vec {x} = \ vec {0} \).
Решение
Нас просят найти \ (\ left \ {\ vec {x}: A \ vec {x} = \ vec {0} \ right \}. \) Другими словами, мы хотим решить систему \ (A \ vec {x} = \ vec {0} \). Пусть \ (\ vec {x} = \ left (\ begin {array} {r} x \\ y \\ z \\ w \ end {array} \ right). \) Тогда это составляет решение \ [\ left (\ begin {array} {rrrr} 1 & 2 & 3 & 0 \\ 2 & 1 & 1 & 2 \\ 4 & 5 & 7 & 2 \ end {array} \ right) \ left (\ begin {array} {c} x \\ y \\ z \\ w \ end {array} \ right) = \ left (\ begin {array} {c} 0 \\ 0 \\ 0 \ end {array} \ right) \]
Это линейная система \ [\ begin {array} {c} x + 2y + 3z = 0 \\ 2x + y + z + 2w = 0 \\ 4x + 5y + 7z + 2w = 0 \ end {array} \] Чтобы решить, настройте расширенную матрицу и сокращение строки, чтобы найти сокращенную форму строки-эшелона.
\ [\ left (\ begin {array} {rrrr | r} 1 & 2 & 3 & 0 & 0 \\ 2 & 1 & 1 & 2 & 0 \\ 4 & 5 & 7 & 2 & 0 \ end { array} \ right) \ rightarrow \ cdots \ rightarrow \ left (\ begin {array} {rrrr | r} 1 & 0 & — \ frac {1} {3} & \ frac {4} {3} & 0 \\ 0 & 1 & \ frac {5} {3} & — \ frac {2} {3} & 0 \\ 0 & 0 & 0 & 0 & 0 \ end {array} \ right) \]
Это дает \ (x = \ frac {1} {3} z- \ frac {4} {3} w \) и \ (y = \ frac {2} {3} w- \ frac {5} {3 } z.\) Поскольку \ (\ mathrm {null} \ left (A \ right) \) состоит из решений этой системы, он состоит из векторов вида
\ [\ left (\ begin {array} {c} \ frac {1} {3} z- \ frac {4} {3} w \\ \ frac {2} {3} w- \ frac {5} {3} z \\ z \\ w \ end {array} \ right) = z \ left (\ begin {array} {r} \ frac {1} {3} \\ — \ frac {5} {3} \\ 1 \\ 0 \ end {array} \ right) + w \ left (\ begin {array} {r} — \ frac {4} {3} \\ \ frac {2} {3} \\ 0 \ \ 1 \ end {array} \ right) \]
Рассмотрим следующий пример.
Пример \ (\ PageIndex {3} \): общее решение
Общее решение линейной системы уравнений — это совокупность всех возможных решений.Найдите общее решение линейной системы,
\ [\ left (\ begin {array} {rrrr} 1 & 2 & 3 & 0 \\ 2 & 1 & 1 & 2 \\ 4 & 5 & 7 & 2 \ end {array} \ right) \ left ( \ begin {array} {r} x \\ y \\ z \\ w \ end {array} \ right) = \ left (\ begin {array} {r} 9 \\ 7 \\ 25 \ end {array} \ справа) \]
с учетом того, что \ (\ left (\ begin {array} {r} x \\ y \\ z \\ w \ end {array} \ right) = \ left (\ begin {array} {r} 1 \\ 1 \\ 2 \\ 1 \ end {array} \ right) \) — одно из решений.
Решение
Обратите внимание, что матрица этой системы такая же, как матрица в примере [exa: matrixnullspace].Следовательно, из теоремы [thm: особое и общее решение] вы получите все решения указанной выше линейной системы, добавив конкретное решение \ (\ vec {x} _p \) к решениям связанной однородной системы \ (\ vec {x } \). Одно конкретное решение дается выше \ [\ vec {x} _p = \ left (\ begin {array} {r} x \\ y \\ z \\ w \ end {array} \ right) = \ left (\ begin {array} {r} 1 \\ 1 \\ 2 \\ 1 \ end {array} \ right) \]
Используя это конкретное решение вместе с решениями, найденными в примере [exa: matrixnullspace], мы получаем следующие решения: \ [z \ left (\ begin {array} {r} \ frac {1} {3} \\ — \ frac {5} {3} \\ 1 \\ 0 \ end {array} \ right) + w \ left (\ begin {array} {r} — \ frac {4} {3} \\ \ frac {2} {3} \\ 0 \\ 1 \ end {array} \ right) + \ left (\ begin {array} {r} 1 \\ 1 \\ 2 \\ 1 \ end {array} \ right) \]
Следовательно, любое решение указанной выше линейной системы имеет такой вид.
Объяснитель уроков: Общее решение системы линейных уравнений
В этом объяснителе мы узнаем, как найти общее решение системы линейных уравнений, независимо от того, имеет ли оно уникальное решение, бесконечное количество решений или нет решения. .
При работе с системой линейных уравнений есть 3 возможные категории решений, которые можно найти.
Самый известный случай — это система линейных уравнений, имеющая единственное решение.Возьмем, например, систему линейных уравнений
2𝑥 + 3𝑦 = 1, −4𝑥 + 𝑦 = −9.
Решение этой системы линейных уравнений любым методом даст 𝑥 = 2 и 𝑦 = −1. Учитывая, что обе переменные
и 𝑦 имеют только одно возможное значение, мы бы сказали, что решение единственное.
Предположим, что вместо этого у нас есть система линейных уравнений
𝑥 − 3𝑦 = 2, −3𝑥 + 9𝑦 = −6.
В этом случае мы видим, что нижнее уравнение по сути является копией первого уравнения, в котором каждый член умножен на
−3.Фактически, мы можем умножить каждый член в левой части на −13
без изменения решения, и система станет
𝑥 − 3𝑦 = 2, 𝑥 − 3𝑦 = 2.
Первое и второе уравнения идентичны, что означает, что нет смысла записывать их оба.
Мы не теряем информации, записывая систему линейных уравнений более кратко в виде
𝑥 − 3𝑦 = 2.
Это показывает, что, в отличие от предыдущего примера, где у нас было уникальное решение, теперь возможно
𝑥 и 𝑦 принимать бесконечно много значений, продолжая решать
оригинальная система линейных уравнений.Если бы мы решили вышеупомянутое уравнение относительно, то мы нашли бы 𝑥 = 2 + 3𝑦.
Если бы мы выбрали примерное значение 𝑦 = 1, то мы бы нашли = 5
и мы могли проверить, действительно ли эта пара значений решает исходную систему. В равной степени мы бы выбрали
𝑦 = −3,
что дало бы 𝑥 = −7. Также бывает, что эта пара значений решает исходную
система уравнений.
Учитывая, что мы можем выбрать любое значение 𝑦 и найти соответствующее значение 𝑥 из уравнения 𝑥 = 2 + 3𝑦,
поэтому у нас есть бесконечно много возможных решений.Именно этот тип решения мы обсудим в этой статье.
В завершение кратко упомянем окончательный возможный тип решения. Рассмотрим систему линейных уравнений
3𝑥 + 𝑦 = −2,6𝑥 + 2𝑦 = −6.
Мы видим, что второе уравнение очень похоже на первое уравнение. Мы умножаем все члены во втором уравнении на 12, получая
3𝑥 + 𝑦 = −2,3𝑥 + 𝑦 = −3.
Теперь у нас есть довольно любопытная пара уравнений, у которых одинаковые левые части, но разные правые.Читая два приведенных выше уравнения, мы должны найти значения 𝑥 и 𝑦, которые при объединении в
точно так же, как-то дают разные выходы. Это явно смехотворно и невозможно достичь, а это означает, что данная система
линейных уравнений не имеет решения. Мы бы сказали, что система непоследовательна или неразрешима. Естественно, мы не
вообще интересуют эти типы систем линейных уравнений.
Метод и сложность решения системы уравнений с бесконечным числом решений не особенно заметны.
отличается от ситуации, когда существует уникальное решение.Метод во многом такой же и не требует передовых знаний.
типа решения, опираясь на метод исключения Гаусса – Жордана для завершения вычислений. Это только половина
расчеты, когда тип решения был определен, подход к методу начинает отклоняться. Независимо от типа решения
система линейных уравнений есть, мы всегда можем найти ее, используя тот же подход к группировке коэффициентов этой системы в
конкретная матрица, которую мы затем обрабатываем с помощью строковых операций, чтобы найти решение.
Определение: расширенная матрица коэффициентов
Рассмотрим общую систему линейных уравнений относительно переменных 𝑥, 𝑥,…, 𝑥 и коэффициентов 𝑎:
𝑎𝑥 + 𝑎𝑥 ⋯ 𝑎𝑥 = 𝑏, 𝑎𝑥 + 𝑎𝑥 ⋯ 𝑎𝑥 = 𝑏, ⋮⋮⋮ ⋱ ⋮⋮⋮ 𝑎𝑥 + 𝑎𝑥 ⋯ 𝑎𝑥 = 𝑏.
Тогда система линейных уравнений также описывается матричным уравнением
⎛⎜⎜⎝𝑎𝑎 ⋯ 𝑎𝑎𝑎 ⋯ 𝑎 ⋮⋮ ⋱ ⋮ 𝑎𝑎 ⋯ 𝑎⎞⎟⎟⎠⎛⎜⎜⎝𝑥𝑥 ⋮ 𝑥⎞⎟⎟⎠ = ⎛⎜⎜⎜⎝𝑏𝑏 ⋮ 𝑏⎞⎟⎟⎟⎠.
Расширенная матрица коэффициентов системы
⎛⎜⎜⎜⎝𝑎𝑎 ⋯ 𝑎𝑏𝑎𝑎 ⋯ 𝑎𝑏 ⋮⋮ ⋱ ⋮⋮ 𝑎𝑎 ⋯ 𝑎𝑏⎞⎟⎟⎟⎠.
Предположим, что мы хотим решить систему линейных уравнений, определенную как
𝑥 − 2𝑦 = −3,5𝑥 − 10𝑦 = −15.
К этому моменту уже очевидно, что второе уравнение совпадает с первым уравнением,
за исключением того, что каждый член умножается на 5. Мы можем разумно ожидать, что будет бесконечное количество решений,
но изначально мы не будем делать таких предположений. Расширенная матрица коэффициентов этой системы уравнений имеет вид
1−2−35−10−15.
Вторая строка является копией первой строки после умножения каждой записи на 5.
Причина написания системы линейных уравнений в такой форме заключается в том, что затем легче манипулировать
матрицу в форму, которая представляет решение системы. Это можно понять по следующей теореме.
Теорема: расширенная матрица коэффициентов и сокращенная форма эшелона
Если система линейных уравнений имеет расширенную матрицу коэффициентов
⎛⎜⎜⎜⎝𝑎𝑎 ⋯ 𝑎𝑏𝑎𝑎 ⋯ 𝑎𝑏 ⋮⋮ ⋱ ⋮⋮ 𝑎𝑎 ⋯ 𝑎𝑏⎞⎟⎟⎟⎠,
то решение системы уравнений кодируется приведенной эшелонированной формой этой матрицы.
Мы продемонстрируем эту теорему, используя систему линейных уравнений, которая была у нас выше:
𝑥 − 2𝑦 = −3,5𝑥 − 10𝑦 = −15,
который имеет расширенную матрицу коэффициентов
1−2−35−10−15.
Мы выделили опорные точки в строке выше, потому что мы будем использовать их как ссылку, чтобы начать процесс размещения
матрица в приведенном виде. Для каждой сводной таблицы нам нужно убедиться, что все остальные записи в том же столбце имеют нулевое значение.
Это означает, что мы можем удалить опорную точку в первой строке или опорную точку во второй строке.Имеет смысл держать точку опоры в
верхнюю строку, поэтому мы используем операцию элементарной строки 𝑟 → 𝑟 − 5𝑟, чтобы преобразовать матрицу в
1−2−3000.
Эта матрица теперь представлена в виде уменьшенного эшелона и, согласно приведенной выше теореме, сообщает нам решение исходной
система линейных уравнений. Мы могли бы записать решение в форме
𝑥 − 2𝑦 = −3, как мы делали выше, но этого соглашения будет недостаточно, когда мы перейдем к системам линейных уравнений
которые имеют более двух переменных, поэтому мы решили написать решение в определенном формате, который будет нам полезен позже.
При выражении решения системы линейных уравнений полезно определить все переменные, которые соответствуют опорной точке в
приведенную эшелонированную форму матрицы, а затем решите каждое выведенное уравнение для этих переменных. В нашем случае у нас есть только одна сводная переменная,
𝑥, которую мы выражаем через непивотную переменную как
𝑥 = −3 + 2𝑦.
Хотя это может показаться тривиальным, затем мы запишем непивотные переменные в терминах самих себя:
𝑦 = 𝑦.
Сопоставление этих двух уравнений дает
𝑥 = −3 + 2𝑦𝑦 = 𝑦.
Хотя это может показаться весьма запутанным, это полностью адекватное изложение решения проблемы
исходная система уравнений. Мы можем пойти дальше и сгруппировать термины в векторной форме как
𝑥𝑦 = − 30 + 𝑦21.
Обычно считается лучшей практикой записывать любые переменные в правой части как независимый параметр, поэтому вместо этого мы записываем решение как
𝑥𝑦 = − 30 + 𝑡21.
Теперь, когда у нас есть все инструменты, необходимые для решения любой системы линейных уравнений, которая имеет бесконечно много решений,
мы применим эту технику к ряду вопросов, которые включают более крупные матрицы расширенных коэффициентов.
Пример 1: Система линейных уравнений с 3 переменными и 3 уравнениями
Найдите общее решение линейной системы
0−121011−25𝑥𝑦𝑧 = 1−11.
Ответ
Сначала создадим расширенную матрицу коэффициентов данной системы линейных уравнений:
⎛⎜⎜⎝0−121101−11−251⎞⎟⎟⎠.
Мы будем использовать элементарные операции со строками, чтобы привести матрицу к сокращенной форме эшелона, тем самым дав решение
к исходной системе уравнений.Чтобы помочь с этим, мы сначала выделяем опорные точки каждой строки, которые являются первыми ненулевыми записями:
⎛⎜⎜⎝0−121101−11−251⎞⎟⎟⎠.
Будет легче достичь формы сокращенного эшелона, если мы сможем сохранить значение 1 в верхней левой записи,
поэтому мы сначала выполняем замену строк 𝑟↔𝑟, давая
⎛⎜⎜⎝1−251101−10−121⎞⎟⎟⎠.
Нам нужно удалить любую ненулевую запись, которая находится выше или ниже точки поворота в первой строке. Есть только одна такая запись,
который является стержнем во втором ряду.Этого можно избежать с помощью строковой операции 𝑟 → 𝑟 − 𝑟,
который производит матрицу
⎛⎜⎜⎝1−25102−4−20−121⎞⎟⎟⎠.
По возможности, как правило, разумнее всего удалять постоянные множители из целых строк, если мы можем сделать это, не вводя
дроби в наши расчеты. В матрице каждая запись во второй строке делится на 2, поэтому мы масштабируем эту строку с помощью операции
𝑟 → 12𝑟, что дает более простую матрицу
⎛⎜⎜⎝1−25101−2−10−121⎞⎟⎟⎠.
Теперь мы должны удалить ненулевую запись, которая находится ниже точки поворота во второй строке, с помощью строковой операции.
𝑟 → 𝑟 + 𝑟. Это дает матрицу
⎛⎜⎜⎝1−25101−2−10000⎞⎟⎟⎠,
который теперь имеет нулевую строку в третьей строке, что означает, что будет бесконечно много решений системы,
при условии, что это не противоречит. Чтобы удалить ненулевую запись над точкой поворота во второй строке, мы выполняем
𝑟 → 𝑟 + 2𝑟, что дает вид приведенного эшелона
⎛⎜⎜⎝101−101−2−10000⎞⎟⎟⎠.
Теперь у нас фактически есть решение исходной системы линейных уравнений. Обратите внимание, что переменные, соответствующие опорным точкам
суть 𝑥 и 𝑦, а переменная, которая не соответствует никаким опорным точкам, — 𝑧.
Запишем матрицу в терминах исходных переменных,
не включая нулевую строку:
𝑥 + 𝑧 = −1𝑦 − 2𝑧 = −1.
Решение обоих этих уравнений для переменных поворота дает
𝑥 = −1 − 𝑧𝑦 = −1 + 2𝑧.
У нас также есть непивотная переменная 𝑧 = 𝑧.Записывая эти 3 уравнения вместе, получаем
𝑥 = −1 − 𝑧𝑦 = −1 + 2𝑧𝑧 = 𝑧.
Мы могли бы эквивалентно выразить это решение в виде
𝑥𝑦𝑧 = − 1−10 + 𝑡 − 121,
где 𝑡 — независимый параметр.
Пример 2: Система линейных уравнений с 3 переменными и 3 уравнениями
Найдите общее решение линейной системы
0−121−211−45𝑥𝑦𝑧 = 1−11.
Ответ
Сначала мы создаем расширенную матрицу коэффициентов системы линейных уравнений, выделяя сводные записи:
⎛⎜⎜⎝0−1211−21−11−451⎞⎟⎟⎠.
Нам нужно будет привести эту матрицу в сокращенный эшелонированный вид. Чтобы поместить 1 в левую верхнюю запись, мы сначала меняем местами строки 𝑟↔𝑟:
⎛⎜⎜⎝1−4511−21−10−121⎞⎟⎟⎠.
Мы не можем представить матрицу в виде приведенного эшелона, если есть какие-либо опорные точки ниже опорной точки в верхнем ряду,
поэтому мы должны удалить точку поворота, которая в настоящее время отображается во второй строке. Операция элементарной строки 𝑟 → 𝑟 − 𝑟
достигнет этого:
⎛⎜⎜⎝1−45102−4−20−121⎞⎟⎟⎠.
Будет полезно, если поворот во второй строке сделать равным 1, что в этом случае может быть достигнуто без введения дробей.
в строку, используя операцию со строками 𝑟 → 12𝑟, чтобы получить
⎛⎜⎜⎝1−45101−2−10−121⎞⎟⎟⎠.
Теперь ясно, что третья строка — это просто копия второй строки, за исключением смены знака в каждой записи.
Таким образом, мы можем удалить всю третью строку с помощью строковой операции 𝑟 → 𝑟 + 𝑟:
⎛⎜⎜⎝1−45101−2−10000⎞⎟⎟⎠.
Уменьшенная форма эшелона достигается с помощью последней строковой операции 𝑟 → 𝑟 + 4𝑟:
⎛⎜⎜⎝10−3−301−2−10000⎞⎟⎟⎠.
Переменные 𝑥 и 𝑦 относятся к двум столбцам, которые содержат точки поворота и переменную
𝑧 нет.Записывая соответствующие уравнения
𝑥 − 3𝑧 = −3𝑦 − 2𝑧 = −1
и решение обоих для переменных поворота дает
𝑥 = −3 + 3𝑧𝑦 = −1 + 2𝑧.
Сочетание этого с непивотной переменной 𝑧 = 𝑧 дает
𝑥 = −3 + 3𝑧𝑦 = −1 + 2𝑧𝑧 = 𝑧.
Это полное решение, и мы также решили записать его в матричной форме как
𝑥𝑦𝑧 = − 3−10 + 𝑡321.
Все методы, описанные выше, можно сразу использовать с более крупной системой линейных уравнений. Пока мы
хорошо разбираются в строковых операциях и имеют полное представление о форме сокращенного эшелона, метод немного отличается
к любому из предыдущих примеров, которые мы практиковали.В следующем примере мы покажем, как точно такой же
Метод может быть применен для поиска решения более крупной системы уравнений.
Пример 3: Система линейных уравнений с 4 переменными и 4 уравнениями
Найдите общее решение линейной системы
⎛⎜⎜⎝10111−1103−1323303⎞⎟⎟⎠𝑥𝑦𝑧𝑤 = ⎛⎜⎜⎝1243⎞⎟⎟⎠.
Ответ
Создаем расширенную матрицу коэффициентов и выделяем сводные записи:
⎛⎜⎜⎜⎝101111−11023−132433033⎞⎟⎟⎟⎠.
Нам нужно удалить все ненулевые записи ниже точки поворота в первой строке. Мы можем сделать это с помощью трех элементарных строк
операции 𝑟 → 𝑟 − 𝑟, 𝑟 → 𝑟 − 3𝑟 и
𝑟 → 𝑟 − 3𝑟. Результирующая матрица
⎛⎜⎜⎜⎝101110−10−110−10−1103−300⎞⎟⎟⎟⎠.
Учитывая, что третья строка является копией второй строки, мы можем удалить всю строку с помощью операции
𝑟 → 𝑟 − 𝑟. Это дает матрицу, в которой третья строка является нулевой строкой:
⎛⎜⎜⎜⎝101110−10−110000003−300⎞⎟⎟⎟⎠,
которую мы перемещаем в нижнюю часть матрицы с помощью операции перестановки строк 𝑟↔𝑟, давая
⎛⎜⎜⎜⎝101110−10−1103−30000000⎞⎟⎟⎟⎠.
Две нижние сводные переменные можно масштабировать, чтобы получить значение 1, с которым обычно более удобно работать, с помощью строковых операций.
𝑟 → −𝑟 и 𝑟 → 13𝑟. Это дает
⎛⎜⎜⎜⎝101110101−101−10000000⎞⎟⎟⎟⎠.
Теперь нам нужно удалить опорную запись в третьей строке, потому что она находится непосредственно под опорной точкой во второй строке.
Операция со строками 𝑟 → 𝑟 − 𝑟 достигает этого:
⎛⎜⎜⎜⎝101110101−100−1−1100000⎞⎟⎟⎟⎠.
На предпоследнем шаге мы масштабируем опорную запись в третьей строке с помощью 𝑟 → −𝑟, что дает
⎛⎜⎜⎜⎝101110101−10011−100000⎞⎟⎟⎟⎠
и позволяет нам удалить оставшуюся ненулевую запись над точкой поворота в третьей строке с помощью строковой операции 𝑟 → 𝑟 − 𝑟:
⎛⎜⎜⎜⎝100020101−10011−100000⎞⎟⎟⎟⎠.
Теперь матрица представлена в виде сокращенного эшелона с поворотными точками, соответствующими переменным.
𝑥, 𝑦 и 𝑧. Оставшаяся переменная 𝑤
представлен четвертым столбцом, в котором нет сводных точек. Выписка соответствующих уравнений дает
𝑥 = 2𝑦 + 𝑤 = −1𝑧 + 𝑤 = −1.
Теперь мы решаем три уравнения для переменных поворота, давая
𝑥 = 2𝑦 = −1 − 𝑤𝑧 = −1 − 𝑤.
Учитывая непивотную переменную 𝑤, полное решение
𝑥 = 2𝑦 = −1 − 𝑤𝑧 = −1 − 𝑤𝑤 = 𝑤.
Записано в векторной форме, имеем
𝑥𝑦𝑧𝑤 = ⎛⎜⎜⎝2−1−10⎞⎟⎟⎠ + 𝑡⎛⎜⎜⎝0−1−11⎞⎟⎟⎠.
Хотя это не было строго необходимо, мы решили представить вышеуказанные решения в очень конкретной форме, с точки зрения
векторов, а также через некоторый произвольный параметр (ы). Причины этого не совсем поверхностны, так как часто бывает полезно иметь
решение системы линейных уравнений, которое записано в этой векторной форме и кодирует ключевую информацию, которая определяет соответствующее векторное пространство.В отличие от решения, написанного в терминах уравнений, гораздо легче понять ключевые компоненты векторного пространства, когда они представлены
в векторной форме.
До сих пор в этом объяснении мы не обсуждали, как мы могли бы записать решение в терминах векторов, если существует более одной поворотной переменной.
В качестве примера предположим, что нам дана система линейных уравнений, из которой мы уже создали расширенную матрицу коэффициентов и
нашел сокращенную форму эшелона
⎛⎜⎜⎜⎝1−10220011−30000000000⎞⎟⎟⎟⎠.
Предполагая, что исходными переменными были 𝑥, 𝑧, 𝑧 и 𝑤, мы получили бы соответствующие уравнения
𝑥 − 𝑦 + 2𝑤 = 2, 𝑧 + 𝑤 = −3.
Сводными переменными будут и 𝑧, а неповоротными переменными — 𝑦 и 𝑤.
Мы решаем два приведенных выше уравнения для основных переменных:
𝑥 = 2 + 𝑦 − 2𝑤, 𝑧 = −3 − 𝑤.
Теперь мы включаем два тривиальных уравнения 𝑦 = 𝑦 и 𝑤 = 𝑤 для неповоротных переменных.
𝑥 = 2 + 𝑦 − 2𝑤𝑦 = 𝑦𝑧 = −3 − 𝑤𝑤 = 𝑤.
Сгруппируйте их вместе как векторы, и, используя два независимых параметра, мы получим полное решение
𝑥𝑦𝑧𝑤 = ⎛⎜⎜⎝20−30⎞⎟⎟⎠ + 𝑠⎛⎜⎜⎝1100⎞⎟⎟⎠ + 𝑡⎛⎜⎜⎝ − 20−11⎞⎟⎟⎠.
В приведенном выше примере нам потребовалось 3 вектора, чтобы полностью выразить решение. Конечно, возможно, что будет более 3-х векторов.
которые должны использоваться для выражения полного решения, и количество этих векторов связано с рангом и нулевой матрицей, как
из которых являются ключевыми понятиями линейной алгебры. Также возможно наличие только одного вектора, необходимого для выражения полного решения, хотя
это означало бы, что решение уникально и что параметры для выражения пространства решений не требуются.
Ключевые моменты
- Расширенной матрицей коэффициентов системы линейных уравнений можно управлять, используя операции со строками.
В форме пониженного эшелона найдено решение исходной системы. - Обычно полезно выразить решение в терминах сводных переменных, которые являются переменными, которые
соответствуют столбцам матрицы, которые содержат опорные точки, когда они находятся в форме сокращенного эшелона. - Если существует бесконечно много решений системы линейных уравнений, то эти решения, как правило, должны
выражаться через векторы с произвольными параметрами.
WTAMU > Виртуальная математическая лаборатория> Алгебра среднего уровня Цели обучения
Введение
Учебник
Практические задачи
Нужна дополнительная помощь по этим темам? Последний раз редактировал Ким Сьюард 10 июля 2011 г. |
Система линейных уравнений — линейная алгебра с приложениями
Практические задачи во многих областях науки, таких как биология, бизнес, химия, информатика, экономика, электроника, инженерия, физика и социальные науки, часто можно свести к решению системы линейных уравнений. Линейная алгебра возникла из попыток найти систематические методы решения этих систем, поэтому естественно начать эту книгу с изучения линейных уравнений.
Если, и — действительные числа, график уравнения вида
— прямая линия (если и не равны нулю), поэтому такое уравнение называется линейным уравнением в переменных и. Однако часто удобно записывать переменные как, особенно когда задействовано более двух переменных. Уравнение вида
называется линейным уравнением в переменных.Здесь обозначают действительные числа (называемые коэффициентами соответственно), а также число (называемое постоянным членом уравнения ). Конечный набор линейных уравнений с переменными называется системой линейных уравнений с этими переменными. Следовательно,
— линейное уравнение; коэффициенты при, и равны, и, а постоянный член равен. Обратите внимание, что каждая переменная в линейном уравнении встречается только в первой степени.
Для линейного уравнения последовательность чисел называется решением уравнения, если
, то есть, если уравнение удовлетворяется при выполнении замен. Последовательность чисел называется решением системы уравнений, если она является решением каждого уравнения в системе.
Система может не иметь решения вообще, или она может иметь уникальное решение, или она может иметь бесконечное семейство решений.Например, система не имеет решения, потому что сумма двух чисел не может быть одновременно 2 и 3. Система, у которой нет решения, называется несогласованной ; система с хотя бы одним решением называется согласованным .
Покажите, что для произвольных значений и
— это решение системы
Просто подставьте эти значения,, и в каждое уравнение.
Поскольку оба уравнения удовлетворяются, это решение для любого выбора и.
Величины и в этом примере называются параметрами , а набор решений, описанный таким образом, считается заданным в параметрической форме и называется общим решением для системы. Оказывается, что решения каждой системы уравнений (если есть — это решений) могут быть даны в параметрической форме (то есть, переменные, задаются в терминах новых независимых переменных и т. Д. .).
Когда задействованы только две переменные, решения систем линейных уравнений могут быть описаны геометрически, потому что график линейного уравнения представляет собой прямую линию, если и не оба равны нулю. Более того, точка с координатами и лежит на прямой тогда и только тогда, когда — то есть когда, является решением уравнения. Следовательно, решения системы линейных уравнений соответствуют точкам, которые лежат на всех рассматриваемых линиях.
В частности, если система состоит только из одного уравнения, должно быть бесконечно много решений, потому что на прямой бесконечно много точек. Если система имеет два уравнения, есть три возможности для соответствующих прямых:
- Линии пересекаются в одной точке. Тогда в системе есть уникальное решение , соответствующее этой точке.
- Линии параллельны (и четкие) и не пересекаются. Тогда в системе нет решения .
- Строки идентичны. Тогда в системе будет бесконечно много решений — по одному для каждой точки на (общей) прямой.
С тремя переменными график уравнения может быть показан как плоскость и, таким образом, снова дает «картину» множества решений. Однако у этого графического метода есть свои ограничения: когда задействовано более трех переменных, физическое изображение графов (называемых гиперплоскостями) невозможно. Необходимо обратиться к более «алгебраическому» методу решения.
Перед описанием метода мы вводим понятие, упрощающее вычисления. Рассмотрим следующую систему
трех уравнений с четырьмя переменными. Массив чисел
, встречающееся в системе, называется расширенной матрицей системы. Каждая строка матрицы состоит из коэффициентов переменных (по порядку) из соответствующего уравнения вместе с постоянным членом. Для наглядности константы разделены вертикальной линией.Расширенная матрица — это просто другой способ описания системы уравнений. Массив коэффициентов при переменных
называется матрицей коэффициентов системы, а
называется постоянной матрицей системы.
Элементарные операции
Алгебраический метод решения систем линейных уравнений описывается следующим образом. Две такие системы называются эквивалентами , если они имеют одинаковый набор решений.Система решается путем написания серии систем, одна за другой, каждая из которых эквивалентна предыдущей системе. Каждая из этих систем имеет тот же набор решений, что и исходная; цель состоит в том, чтобы получить систему, которую легко решить. Каждая система в серии получается из предыдущей системы простой манипуляцией, выбранной так, чтобы она не меняла набор решений.
В качестве иллюстрации мы решаем систему таким образом. На каждом этапе отображается соответствующая расширенная матрица.Исходная система —
Сначала вычтите дважды первое уравнение из второго. В результате получается система
.
, что эквивалентно оригиналу. На этом этапе мы получаем, умножив второе уравнение на. В результате получается эквивалентная система
.
Наконец, мы дважды вычитаем второе уравнение из первого, чтобы получить другую эквивалентную систему.
Теперь эту систему легко решить! И поскольку он эквивалентен исходной системе, он обеспечивает решение этой системы.
Обратите внимание, что на каждом этапе в системе (и, следовательно, в расширенной матрице) выполняется определенная операция для создания эквивалентной системы.
Следующие операции, называемые элементарными операциями , могут в обычном порядке выполняться над системами линейных уравнений для получения эквивалентных систем.
- Поменяйте местами два уравнения.
- Умножьте одно уравнение на ненулевое число.
- Добавьте одно уравнение, кратное одному, к другому уравнению.
Предположим, что последовательность элементарных операций выполняется над системой линейных уравнений. Тогда полученная система имеет тот же набор решений, что и исходная, поэтому две системы эквивалентны.
Элементарные операции, выполняемые над системой уравнений, производят соответствующие манипуляции с строками расширенной матрицы. Таким образом, умножение строки матрицы на число означает умножение каждой записи строки на.Добавление одной строки к другой означает добавление каждой записи этой строки к соответствующей записи другой строки. Аналогично производится вычитание двух строк. Обратите внимание, что мы считаем две строки равными, если соответствующие записи совпадают.
В ручных вычислениях (и в компьютерных программах) мы манипулируем строками расширенной матрицы, а не уравнениями. По этой причине мы переформулируем эти элементарные операции для матриц.
Следующие операции называются операциями с элементарной строкой матрицы.
- Поменять местами два ряда.
- Умножить одну строку на ненулевое число.
- Добавить кратное одной строки в другую строку.
На иллюстрации выше серия таких операций привела к матрице вида
, где звездочки обозначают произвольные числа. В случае трех уравнений с тремя переменными цель состоит в том, чтобы получить матрицу вида
Это не всегда происходит, как мы увидим в следующем разделе.Вот пример, в котором это действительно происходит.
Решение:
Расширенная матрица исходной системы —
Чтобы создать в верхнем левом углу, мы можем умножить строку с 1 на. Однако можно получить без введения дробей, вычтя строку 2 из строки 1. Результат:
Верхний левый угол теперь используется для «очистки» первого столбца, то есть для создания нулей в других позициях в этом столбце.Сначала отнимите строку 1 от строки 2, чтобы получить
Следующее умножение на строку 1 из строки 3. Результат:
.
Это завершает работу над столбцом 1. Теперь мы используем во второй позиции второй строки, чтобы очистить второй столбец, вычитая строку 2 из строки 1 и затем добавляя строку 2 к строке 3. Для удобства обе операции со строками сделано за один шаг. Результат
Обратите внимание, что две последние манипуляции не повлияли на первый столбец (во второй строке там стоит ноль), поэтому наши предыдущие усилия не были подорваны.Наконец, мы очищаем третий столбец. Начните с умножения строки 3 на, чтобы получить
.
Теперь вычтите умножение строки 3 из строки 1, а затем прибавьте умножение строки 3 к строке 2, чтобы получить
.
Соответствующие уравнения:, и, которые дают (единственное) решение.
Алгебраический метод, представленный в предыдущем разделе, можно резюмировать следующим образом: Для данной системы линейных уравнений используйте последовательность элементарных операций со строками, чтобы преобразовать расширенную матрицу в «красивую» матрицу (это означает, что соответствующие уравнения легко решить. ).В примере 1.1.3 эта красивая матрица приняла вид
.
Следующие определения идентифицируют хорошие матрицы, возникающие в этом процессе.
Матрица, как говорят, находится в форме рядов (и будет называться матрицей рядов , если она удовлетворяет следующим трем условиям:
- Все нулевых строк (полностью состоящие из нулей) находятся внизу.
- Первая ненулевая запись слева в каждой ненулевой строке — это a, называемая ведущей для этой строки.
- Каждый ведущий элемент находится справа от всех ведущих s в строках над ним.
Матрица-эшелон называется сокращенной строкой-эшелонной формой (и будет называться сокращенной матрицей-эшелоном , если, кроме того, она удовлетворяет следующему условию:
4. Каждый ведущий элемент — это единственная ненулевая запись в своем столбце.
Матрицы «строка-эшелон» имеют форму «ступеньки», как показано в следующем примере (звездочки указывают произвольные числа).
Ведущие идут «вниз и вправо» через матрицу. Записи выше и справа от ведущих s произвольны, но все записи ниже и слева от них равны нулю. Следовательно, матрица в виде эшелона строк находится в сокращенной форме, если, кроме того, все элементы непосредственно над каждым ведущим равны нулю. Обратите внимание, что матрица в форме эшелона строк может быть приведена к сокращенной форме с помощью еще нескольких операций со строками (используйте операции со строками, чтобы последовательно создавать нули над каждой ведущей единицей, начиная справа).
Важность матриц строка-эшелон вытекает из следующей теоремы.
Каждая матрица может быть приведена к (сокращенной) форме строки-эшелона последовательностью элементарных операций со строками.
Фактически, мы можем дать пошаговую процедуру для фактического нахождения матрицы ряда строк. Обратите внимание: несмотря на то, что существует множество последовательностей операций со строками, которые приведут матрицу к форме ряда строк, та, которую мы используем, является систематической и ее легко программировать на компьютере. Обратите внимание, что алгоритм имеет дело с матрицами в целом, возможно, со столбцами нулей.
Шаг 1. Если матрица полностью состоит из нулей, остановитесь — она уже в виде эшелона строк.
Шаг 2. В противном случае найдите первый столбец слева, содержащий ненулевую запись (назовите его), и переместите строку, содержащую эту запись, в верхнюю позицию.
Шаг 3. Теперь умножьте новую верхнюю строку на, чтобы создать интерлиньяж.
Шаг 4. Вычитая числа, кратные этой строке, из строк под ней, сделайте каждую запись ниже начального нуля. Это завершает первую строку, и все дальнейшие операции со строками выполняются с оставшимися строками.
Шаг 5. Повторите шаги 1–4 для матрицы, состоящей из оставшихся строк.
Процесс останавливается, когда либо на шаге 5 не остается строк, либо оставшиеся строки состоят полностью из нулей.
Обратите внимание на то, что гауссовский алгоритм является рекурсивным: когда получен первый ведущий, процедура повторяется для оставшихся строк матрицы. Это упрощает использование алгоритма на компьютере. Обратите внимание, что в решении примера 1.1.3 не использовался гауссовский алгоритм в том виде, в каком он был написан, потому что первый ведущий не был создан путем деления строки 1 на.Причина этого в том, что он избегает дробей. Однако общий шаблон ясен: создайте ведущие слева направо, используя каждый из них по очереди, чтобы создать нули под ним. Вот один пример.
Решение:
Соответствующая расширенная матрица —
Создайте первую ведущую, поменяв местами строки 1 и 2
Теперь вычтите умноженную строку 1 из строки 2 и вычтите умноженную строку 1 из строки 3.Результат
Теперь вычтите строку 2 из строки 3, чтобы получить
.
Это означает, что следующая сокращенная система уравнений
эквивалентен исходной системе. Другими словами, у них одинаковые решения. Но эта последняя система явно не имеет решения (последнее уравнение требует этого и удовлетворяет, а таких чисел не существует). Следовательно, исходная система не имеет решения.
Для решения линейной системы расширенная матрица преобразуется в сокращенную форму строки-эшелон, а переменные, соответствующие ведущим, называются ведущими переменными .Поскольку матрица представлена в сокращенной форме, каждая ведущая переменная встречается ровно в одном уравнении, поэтому это уравнение может быть решено для получения формулы для ведущей переменной в терминах не ведущих переменных. Принято называть нелидирующие переменные «свободными» переменными и маркировать их новыми переменными, называемыми параметрами . Каждый выбор этих параметров приводит к решению системы, и каждое решение возникает таким образом. Эта процедура в целом работает и получила название
.
Для решения системы линейных уравнений выполните следующие действия:
- Перенести расширенную матрицу \ index {расширенную матрицу} \ index {матрица! Расширенная матрица} в сокращенную матрицу-эшелон строк, используя элементарные операции со строками.
- Если возникает строка, система несовместима.
- В противном случае назначьте не ведущие переменные (если они есть) в качестве параметров и используйте уравнения, соответствующие сокращенной матрице строки-эшелон, чтобы найти ведущие переменные в терминах параметров.
Существует вариант этой процедуры, в котором расширенная матрица переносится только в строчно-эшелонированную форму. Не ведущие переменные назначаются как параметры, как и раньше. Затем последнее уравнение (соответствующее форме строки-эшелона) используется для решения последней ведущей переменной в терминах параметров.Эта последняя ведущая переменная затем подставляется во все предыдущие уравнения. Затем второе последнее уравнение дает вторую последнюю ведущую переменную, которая также подставляется обратно. Процесс продолжает давать общее решение. Эта процедура называется обратной заменой . Можно показать, что эта процедура численно более эффективна и поэтому важна при решении очень больших систем.
Рейтинг
Можно доказать, что уменьшенная строка-эшелонированная форма матрицы однозначно определяется.То есть, независимо от того, какая серия операций со строками используется для переноса в сокращенную матрицу эшелонов строк, результатом всегда будет одна и та же матрица. Напротив, это неверно для матриц ряда строк: разные серии операций со строками могут переносить одну и ту же матрицу в разные матрицы ряда строк. В самом деле, матрица может быть перенесена (с помощью одной строковой операции) в матрицу с эшелонированием строк, а затем с помощью другой строковой операции в (сокращенную) матрицу с эшелонированием строк. Тем не менее, — это , правда, что количество ведущих единиц должно быть одинаковым в каждой из этих матриц строка-эшелон (это будет доказано позже).Следовательно, количество зависит только от того, каким образом приведено в строй.
Ранг матрицы — это количество ведущих s в любой матрице-эшелоне строки, к которой можно перенести операции со строками.
Вычислить ранг.
Решение:
Приведение к строчной форме
Так как эта матрица эшелонов строк имеет два ведущих s, rank.
Предположим, что ранг, где — матрица со строками и столбцами.Тогда потому что ведущие s лежат в разных строках, и потому что ведущие s лежат в разных столбцах. Более того, у ранга есть полезное приложение к уравнениям. Напомним, что система линейных уравнений называется непротиворечивой, если она имеет хотя бы одно решение.
Проба:
Тот факт, что ранг расширенной матрицы равен, означает, что есть ровно ведущие переменные и, следовательно, точно не ведущие переменные. Все эти нелидирующие переменные назначаются как параметры в гауссовском алгоритме, поэтому набор решений включает в себя именно параметры.Следовательно, если существует хотя бы один параметр, а значит, и решений бесконечно много. Если, нет параметров и поэтому единственное решение.
Теорема 1.2.2 показывает, что для любой системы линейных уравнений существуют ровно три возможности:
- Нет решения . Это происходит, когда ряд встречается в форме эшелона строк. Это тот случай, когда система несовместима.
- Уникальное решение . Это происходит, когда каждая переменная является ведущей переменной.
- Бесконечно много решений . Это происходит, когда система согласована и есть хотя бы одна не ведущая переменная, поэтому задействован хотя бы один параметр.
https://www.geogebra.org/m/cwQ9uYCZ
Пожалуйста, ответьте на эти вопросы после открытия веб-страницы:
1. Для данной линейной системы, что представляет каждая из них?
2. Исходя из графика, что можно сказать о решениях? Есть ли у системы одно решение, нет решения или бесконечно много решений? Почему
3.Измените постоянный член в каждом уравнении на 0, что изменилось на графике?
4. Для следующей линейной системы:
Можете ли вы решить эту проблему методом исключения Гаусса? Что вы наблюдаете, глядя на график?
Многие важные проблемы связаны с линейными неравенствами , а не с линейными уравнениями Например, условие для переменных может принимать форму неравенства, а не равенства.Существует метод (называемый симплексным алгоритмом ) для поиска решений системы таких неравенств, который максимизирует функцию вида где и — фиксированные константы.
Система уравнений с переменными называется однородной , если все постоянные члены равны нулю, то есть если каждое уравнение системы имеет вид
Очевидно, решение такой системы; это называется тривиальным решением .Любое решение, в котором хотя бы одна переменная имеет ненулевое значение, называется нетривиальным решением.
Наша главная цель в этом разделе — дать полезное условие, при котором однородная система имеет нетривиальные решения. Следующий пример поучителен.
Покажите, что следующая однородная система имеет нетривиальные решения.
Решение:
Приведение расширенной матрицы к сокращенной форме эшелона строк описано ниже.
Ведущими переменными являются,, и, например, назначается как параметр.Тогда общее решение:,,,. Следовательно, взяв (скажем), мы получим нетривиальное решение:,,,.
Существование нетривиального решения в примере 1.3.1 обеспечивается наличием параметра в решении. Это связано с тем, что существует нелидирующая переменная (в данном случае). Но здесь должно быть не ведущей переменной, потому что здесь четыре переменных и только три уравнения (и, следовательно, не более три ведущие переменные).Это обсуждение обобщает доказательство следующей основной теоремы.
Если однородная система линейных уравнений имеет больше переменных, чем уравнений, то она имеет нетривиальное решение (фактически бесконечно много).
Проба:
Предположим, что есть уравнения в переменных, где, и пусть обозначают сокращенную строчно-эшелонированную форму расширенной матрицы. Если есть ведущие переменные, есть не ведущие переменные и, следовательно, параметры. Следовательно, достаточно показать это.Но потому что имеет ведущие единицы и строки, и по гипотезе. Итак, что дает.
Обратите внимание, что обратное утверждение теоремы 1.3.1 неверно: если однородная система имеет нетривиальные решения, у нее не должно быть больше переменных, чем у уравнений (система имеет нетривиальные решения, но.)
Теорема 1.3.1 очень полезна в приложениях. В следующем примере представлена иллюстрация из геометрии.
Мы называем график уравнения коникой , если числа, и не равны нулю.Покажите, что есть хотя бы одна коника, проходящая через любые пять точек на плоскости, которые не все лежат на одной прямой.
Решение:
Пусть координаты пяти точек будут,,, и. График проходов if
Это дает пять уравнений, по одному для каждого, линейных по шести переменным,,,,, и. Следовательно, по теореме 1.1.3 существует нетривиальное решение. Если все пять точек лежат на линии с уравнением, вопреки предположению. Следовательно, один из « отличен от нуля.
Линейные комбинации и базовые решения
Что касается строк, два столбца считаются равными , если они имеют одинаковое количество записей и соответствующие записи одинаковы. Позвольте и быть столбцами с одинаковым количеством записей. Что касается операций с элементарными строками, их сумма получается путем сложения соответствующих записей, и, если это число, скалярное произведение определяется путем умножения каждой записи на. Точнее:
Сумма скалярных кратных нескольких столбцов называется линейной комбинацией этих столбцов.Например, это линейная комбинация и для любого выбора чисел и.
Решение:
Для, мы должны определить, существуют ли числа, и такие, что, то есть
Приравнивание соответствующих элементов дает систему линейных уравнений,, и для,, и. Путем исключения Гаусса решение есть, и где — параметр. Взяв, мы видим, что это линейная комбинация, и.
Обращаясь к, снова ищем, и такие, что; то есть
, что приводит к уравнениям,, и для действительных чисел, и.Но на этот раз существует , нет решения , как может проверить читатель, так же как и , а не , линейная комбинация, и.
Наш интерес к линейным комбинациям проистекает из того факта, что они предоставляют один из лучших способов описания общего решения однородной системы линейных уравнений. Когда
решает такую систему с переменными, запишите переменные в виде матрицы столбцов:. Обозначено тривиальное решение. В качестве иллюстрации, общее решение в
Пример 1.3.1 — это,, и, где — параметр, и теперь мы могли бы выразить это как
, говоря, что общее решение -, где произвольно.
Теперь пусть и — два решения однородной системы с переменными. Тогда любая линейная комбинация этих решений снова оказывается решением системы. В более общем плане:
Фактически, предположим, что типичное уравнение в системе имеет вид, и предположим, что
, являются решениями. Потом и
.
Следовательно, это тоже решение, потому что
Аналогичный аргумент показывает, что Утверждение 1.1 верно для линейных комбинаций более двух решений.
Примечательно то, что каждое решение однородной системы представляет собой линейную комбинацию определенных частных решений, и, фактически, эти решения легко вычисляются с использованием гауссовского алгоритма. Вот пример.
Решить однородную систему с матрицей коэффициентов
Решение:
Приведение расширенной матрицы к уменьшенной форме —
, поэтому решениями являются,, и методом исключения Гаусса.Следовательно, мы можем записать общее решение в матричной форме
Вот и частные решения, определяемые гауссовским алгоритмом.
Решения и в примере 1.3.5 обозначены следующим образом:
Алгоритм Гаусса систематически выдает решения для любой однородной линейной системы, называемые базовыми решениями , по одному для каждого параметра.
Кроме того, алгоритм дает стандартный способ выразить каждое решение как линейную комбинацию базовых решений, как в Примере 1.3.5, где общее решение принимает вид
Следовательно, вводя новый параметр, мы можем умножить исходное базовое решение на 5 и таким образом исключить дроби.
По этой причине:
Любое ненулевое скалярное кратное базового решения будет по-прежнему называться базовым решением.
Таким же образом алгоритм Гаусса выдает базовые решения для для каждой однородной системы, по одному для каждого параметра (есть нет базовых решений, если система имеет только тривиальное решение).Более того, каждое решение задается алгоритмом как линейная комбинация
этих базовых решений (как в Примере 1.3.5). Если имеет ранг, теорема 1.2.2 показывает, что есть ровно параметры, а значит, и базовые решения. Это доказывает:
Найдите основные решения однородной системы с матрицей коэффициентов и выразите каждое решение как линейную комбинацию основных решений, где
Решение:
Приведение расширенной матрицы к сокращенной строчно-эшелонированной форме —
, поэтому общее решение — это,,,, и где, и — параметры.В матричной форме это
Отсюда базовые решения —
у знак равно — 2 Икс + 4 у знак равно — 2 Икс — 3 | |
у знак равно 0.5 Икс + 2 у знак равно — 2 Икс — 3 | |
у знак равно — 2 Икс — 4 у + 4 знак равно — 2 Икс | Существует несколько различных методов решения систем линейных уравнений:
См. Второй график выше. Решение — это место пересечения двух линий, точка ( — 2 , 1 ) . Решите систему { 3 Икс + 2 у знак равно 16 7 Икс + у знак равно 19 Решите второе уравнение относительно у . у знак равно 19 — 7 Икс Заменять 19 — 7 Икс для у в первом уравнении и решить для Икс . 3 Икс + 2 ( 19 — 7 Икс ) знак равно 16 3 Икс + 38 — 14 Икс знак равно 16 — 11 Икс знак равно — 22 Икс знак равно 2 Заменять 2 для Икс в у знак равно 19 — 7 Икс и решить для у . у знак равно 19 — 7 ( 2 ) у знак равно 5 Решение ( 2 , 5 ) . Решите систему { 4 Икс + 3 у знак равно — 2 8 Икс — 2 у знак равно 12 Умножьте первое уравнение на — 2 и добавьте результат ко второму уравнению. — 8 Икс — 6 у знак равно 4 8 Икс — 2 у знак равно 12 _ — 8 у знак равно 16 Решить для у . у знак равно — 2 Замена для у в любом из исходных уравнений и решите относительно Икс . 4 Икс + 3 ( — 2 ) знак равно — 2 4 Икс — 6 знак равно — 2 4 Икс знак равно 4 Икс знак равно 1 Решение ( 1 , — 2 ) . |
Системы линейных уравнений
Линейное уравнение — это уравнение для линии .
Линейное уравнение не всегда имеет вид y = 3,5 — 0,5x ,
Также может быть как y = 0,5 (7 — x)
Или как y + 0,5x = 3,5
Или как y + 0,5x — 3,5 = 0 и более.
(Примечание: это одно и то же линейное уравнение!)
A Система линейных уравнений — это когда у нас есть два или более линейных уравнения , работающих вместе.
Пример: Вот два линейных уравнения:
Вместе они представляют собой систему линейных уравнений.
Можете ли вы сами определить значения x и y ? (Просто попробуйте, поиграйте с ними немного.)
Попробуем построить и решить реальный пример:
Пример: вы против лошади
Это гонка!
Вы можете бегать 0,2 км каждую минуту.
Лошадь может бежать 0,5 км каждую минуту. Но оседлать лошадь нужно за 6 минут.
Как далеко вы можете уйти, прежде чем лошадь вас поймает?
Мы можем составить два уравнения ( d = расстояние в км, t = время в минутах)
- Вы работаете на 0.2 км каждую минуту, поэтому d = 0,2 т
- Лошадь бежит со скоростью 0,5 км в минуту, но мы берем на ее время 6: d = 0,5 (t − 6)
Итак, у нас есть система уравнений ( линейных ):
Решаем на графике:
Вы видите, как лошадь стартует через 6 минут, а потом бежит быстрее?
Кажется, тебя поймают через 10 минут … Тебе всего 2 км.
В следующий раз беги быстрее.
Итак, теперь вы знаете, что такое система линейных уравнений.
Давайте продолжим узнавать о них больше ….
Решение
Существует множество способов решения линейных уравнений!
Давайте посмотрим на другой пример:
Пример: Решите эти два уравнения:
На этом графике показаны два уравнения:
Наша задача — найти место пересечения двух линий.
Ну, мы видим, где они пересекаются, так что это уже решено графически.
А теперь давайте решим это с помощью алгебры!
Хммм … как это решить? Способов может быть много! В этом случае в обоих уравнениях есть «y», поэтому давайте попробуем вычесть все второе уравнение из первого:
x + y — (−3x + y) = 6 — 2
А теперь упростим:
х + у + 3х — у = 6-2
4x = 4
х = 1
Итак, теперь мы знаем, что линии пересекаются в точке x = 1 .
И мы можем найти совпадающее значение y , используя любое из двух исходных уравнений (потому что мы знаем, что они имеют одинаковое значение при x = 1). Воспользуемся первым (второй можете попробовать сами):
х + у = 6
1 + у = 6
г = 5
И решение:
x = 1 и y = 5
И график показывает, что мы правы!
Линейные уравнения
В линейных уравнениях допускаются только простые переменные. Нет x 2 , y 3 , √x и т. Д. :
Линейное против нелинейного
Размеры
| A Linear Equation может быть в 2 измерениях … (например, x и y ) | ||
| … или в 3-х измерениях … (получается самолет) | ||
| … или 4 размера … | ||
| … или больше! |
Общие переменные
Чтобы уравнения «работали вместе», они разделяют одну или несколько переменных:
Система уравнений состоит из двух или более уравнений в одной или нескольких переменных
Множество переменных
Таким образом, Система уравнений может иметь многих, уравнений и многих переменных.
Пример: 3 уравнения с 3 переменными
| 2x | + | y | – | 2z | = | 3 |
| x | – | y | – | z | = | 0 |
| x | + | y | + | 3z | = | 12 |
Может быть любая комбинация:
- 2 уравнения с 3 переменными,
- 6 уравнений с 4-мя переменными,
- 9000 уравнений в 567 переменных,
- и др.
Решения
Когда количество уравнений равно , то же , что и количество переменных, , вероятно, будет решением. Не гарантировано, но вероятно.
На самом деле есть только три возможных случая:
- Нет раствор
- Одно решение
- Бесконечное множество решений
Когда нет решения уравнения называются «несовместимыми» .
Один или бесконечно много решений называются «согласованными»
Вот диаграмма для 2 уравнения с 2 переменными :
Независимая
«Независимый» означает, что каждое уравнение дает новую информацию.
В противном случае они «Зависимые» .
Также называется «линейная независимость» и «линейная зависимость»
Пример:
Эти уравнения — «Зависимые» , потому что они на самом деле являются тем же уравнением , только умноженным на 2.
Итак, второе уравнение не дало новой информации .
Где верны уравнения
Уловка состоит в том, чтобы найти, где все уравнений являются истинными одновременно .
Верно? Что это значит?
Пример: вы против лошади
Линия «ты» истинна по всей ее длине (но больше нигде).
В любом месте этой строки d равно 0.2т
- при t = 5 и d = 1 уравнение истинно (d = 0,2t? Да, поскольку 1 = 0,2 × 5 верно)
- при t = 5 и d = 3, уравнение неверно (Является ли d = 0,2t? Нет, поскольку 3 = 0,2 × 5 неверно )
Точно так же линия «лошади» истинна по всей ее длине (но больше нигде).
Но только в точке, где они пересекают (при t = 10, d = 2), они оба истинны .
Значит, они должны быть правдой одновременно …
… поэтому некоторые люди называют их «Одновременные линейные уравнения»
Решить с помощью алгебры
Для их решения принято использовать алгебру.
Вот пример «Лошади», решенный с помощью алгебры:
Пример: вы против лошади
Система уравнений:
В этом случае кажется, что проще всего установить их равными друг другу:
d = 0.2т = 0,5 (т − 6)
Начать с : 0,2t = 0,5 (t — 6)
Расширить 0,5 (t − 6) : 0,2t = 0,5t — 3
Вычтем 0,5t с обеих сторон: −0,3t = −3
Разделим обе части на −0,3 : t = −3 / −0,3 = 10 минут
Теперь мы знаем , когда тебя поймают!
Зная t , можно вычислить d : d = 0,2t = 0,2 × 10 = 2 км
И наше решение:
t = 10 минут и d = 2 км
Алгебра против графиков
Зачем использовать алгебру, если графики настолько просты? Потому что:
Более двух переменных невозможно решить с помощью простого графика.
Итак, алгебра приходит на помощь двумя популярными методами:
- Решение заменой
- Решение путем исключения
Мы увидим каждую с примерами по 2 переменным и 3 переменным. Вот и …
Решение заменой
Это шаги:
- Напишите одно из уравнений в стиле «переменная = …»
- Заменить (т.е. заменить) эту переменную в другое уравнение (а).
- Решите другое уравнение (а)
- (повторить при необходимости)
Вот пример с 2 уравнениями с 2 переменными :
Пример:
Мы можем начать с любого уравнения и любой переменной .
Воспользуемся вторым уравнением и переменной «y» (это выглядит как простейшее уравнение).
Напишите одно из уравнений в стиле «переменная =»… «:
Мы можем вычесть x из обеих частей x + y = 8, чтобы получить y = 8 — x . Теперь наши уравнения выглядят так:
Теперь замените «y» на «8 — x» в другом уравнении:
- 3x + 2 (8 — x) = 19
- у = 8 — х
Решите, используя обычные методы алгебры:
Развернуть 2 (8 − x) :
- 3x + 16 — 2x = 19
- у = 8 — х
Тогда 3x − 2x = x :
И на последок 19−16 = 3
Теперь мы знаем, что такое x , мы можем поместить его в уравнение y = 8 — x :
И ответ:
х = 3
у = 5
Примечание: поскольку — это решение, уравнения «непротиворечивы»
Проверка: почему бы вам не проверить, работают ли x = 3 и y = 5 в обоих уравнениях?
Решение подстановкой: 3 уравнения с 3 переменными
ОК! Давайте перейдем к более длинному примеру : 3 уравнения с 3 переменными .
Это несложно, сделать … просто нужно много времени !
Пример:
- х + г = 6
- г — 3у = 7
- 2x + y + 3z = 15
Мы должны аккуратно выровнять переменные, иначе мы потеряем из виду, что делаем:
| x | + | z | = | 6 | |||||
| – | 3 года | + | z | = | 7 | ||||
| 2x | + | y | + | 3z | = | 15 |
WeI может начать с любого уравнения и любой переменной.Воспользуемся первым уравнением и переменной «x».
Напишите одно из уравнений в стиле «переменная = …»:
| x | = | 6 — z | |||||||
| – | 3 года | + | z | = | 7 | ||||
| 2x | + | y | + | 3z | = | 15 | |||
Теперь замените «x» на «6 — z» в других уравнениях:
(К счастью, есть только одно уравнение с x в нем)
| х | = | 6 — z | ||||||||
| – | 3 года | + | z | = | 7 | |||||
| 2 (6-z) | + | y | + | 3z | = | 15 | ||||
Решите, используя обычные методы алгебры:
2 (6 − z) + y + 3z = 15 упрощается до y + z = 3 :
| x | = | 6 — z | |||||||
| – | 3 года | + | z | = | 7 | ||||
| y | + | z | = | 3 | |||||
Хорошо.Мы добились некоторого прогресса, но пока не достигли этого.
Теперь повторите процесс , но только для последних 2 уравнений.
Напишите одно из уравнений в стиле «переменная = …»:
Выберем последнее уравнение и переменную z:
| x | = | 6 — z | |||||||
| – | 3 года | + | z | = | 7 | ||||
| z | = | 3 — х лет | |||||||
Теперь замените «z» на «3 — y» в другом уравнении:
| x | = | 6 — z | |||||||
| – | 3 года | + | 3 — х лет | = | 7 | ||||
| z | = | 3 года | |||||||
Решите, используя обычные методы алгебры:
−3y + (3 − y) = 7 упрощается до −4y = 4 , или другими словами y = −1
| x | = | 6 — z | |||||||
| y | = | -1 | |||||||
| z | = | 3 года | |||||||
Почти готово!
Зная, что y = −1 , мы можем вычислить, что z = 3 − y = 4 :
| x | = | 6 — z | |||||||
| y | = | -1 | |||||||
| z | = | 4 | |||||||
И зная, что z = 4 , мы можем вычислить, что x = 6 − z = 2 :
| x | = | 2 | |||||||
| y | = | -1 | |||||||
| z | = | 4 |
И ответ:
х = 2
у = -1
г = 4
Проверка: проверьте сами.
Мы можем использовать этот метод для 4 или более уравнений и переменных … просто повторяйте одни и те же шаги снова и снова, пока не решите проблему.
Заключение: Замена работает хорошо, но требует много времени.
Решение путем исключения
Уничтожение может быть быстрее … но должно быть аккуратным.
«Исключить» означает удалить : этот метод работает путем удаления переменных до тех пор, пока не останется только одна.
Идея в том, что мы можем безопасно :
- умножить уравнение на константу (кроме нуля),
- прибавить (или вычесть) уравнение к другому уравнению
Как в этих примерах:
ПОЧЕМУ мы можем складывать уравнения друг в друга?
Представьте себе два действительно простых уравнения:
х — 5 = 3
5 = 5
Мы можем добавить «5 = 5» к «x — 5 = 3»:
х — 5 + 5 = 3 + 5
х = 8
Попробуйте сами, но используйте 5 = 3 + 2 в качестве второго уравнения
Он по-прежнему будет работать нормально, потому что обе стороны равны (для этого стоит знак =!)
Мы также можем поменять местами уравнения, чтобы первое могло стать вторым и т. Д., Если это поможет.
Хорошо, время для полного примера. Давайте использовать предыдущий пример 2 уравнения с 2 переменными :
Пример:
Очень важно, чтобы все было в порядке:
| 3x | + | 2 года | = | 19 | |||
| x | + | y | = | 8 |
Сейчас… наша цель — исключить переменную из уравнения.
Сначала мы видим, что есть «2y» и «y», так что давайте поработаем над этим.
Умножьте второе уравнение на 2:
| 3x | + | 2 года | = | 19 | |||
| 2 x | + | 2 y | = | 16 |
Вычтем второе уравнение из первого уравнения:
| x | = | 3 | |||||
| 2x | + | 2 года | = | 16 |
Ура! Теперь мы знаем, что такое x!
Затем мы видим, что во втором уравнении есть «2x», поэтому давайте уменьшим его вдвое, а затем вычтем «x»:
Умножьте второе уравнение на ½ (т.е. разделить на 2):
| x | = | 3 | |||||
| x | + | y | = | 8 |
Вычтем первое уравнение из второго уравнения:
| x | = | 3 | |||||
| y | = | 5 |
Готово!
И ответ:
x = 3 и y = 5
А вот график:
Синяя линия — это место, где 3x + 2y = 19 истинно
Красная линия — это место, где x + y = 8 истинно
При x = 3, y = 5 (где линии пересекаются) они равны , оба значения истинны. Это и есть ответ.
Вот еще один пример:
Пример:
- 2х — у = 4
- 6x — 3y = 3
Разложите аккуратно:
| 2x | – | y | = | 4 | |||
| 6x | – | 3 года | = | 3 |
Умножьте первое уравнение на 3:
| 6x | – | 3 года | = | 12 | |||
| 6x | – | 3 года | = | 3 |
Вычтем второе уравнение из первого уравнения:
| 0 | – | 0 | = | 9 | |||
| 6x | – | 3 года | = | 3 |
0-0 = 9 ???
Что здесь происходит?
Все просто, решения нет.
| На самом деле это параллельные линии: |
И на последок:
Пример:
- 2х — у = 4
- 6x — 3y = 12
Аккуратно:
| 2x | – | y | = | 4 | |||
| 6x | – | 3 года | = | 12 |
Умножьте первое уравнение на 3:
| 6x | – | 3 года | = | 12 | |||
| 6x | – | 3 года | = | 12 |
Вычтем второе уравнение из первого уравнения:
| 0 | – | 0 | = | 0 | |||
| 6x | – | 3 года | = | 3 |
0 — 0 = 0
Ну, это на самом деле ИСТИНА! Ноль действительно равен нулю…
… это потому, что на самом деле это одно и то же уравнение …
… так что существует бесконечное количество решений
| Это та же строка: |
Итак, теперь мы рассмотрели пример каждого из трех возможных случаев:
- Нет раствор
- Одно решение
- Бесконечное множество решений
Решение методом исключения: 3 уравнения с 3 переменными
Прежде чем мы начнем со следующего примера, давайте рассмотрим улучшенный способ решения задач.
Следуйте этому методу, и мы с меньшей вероятностью ошибемся.
Прежде всего удалите переменные в порядке :
.
- Сначала удалите x с (из уравнений 2 и 3, по порядку)
- , затем исключите y (из уравнения 3)
Вот как мы их устраняем:
У нас есть «форма треугольника»:
Теперь начните снизу и вернитесь к (так называемая «обратная подстановка»)
(введите z , чтобы найти y , затем z и y , чтобы найти x ):
И решаемся:
ТАКЖЕ, мы обнаружим, что проще выполнить некоторые вычислений в уме или на бумаге для заметок, чем всегда работать в рамках системы уравнений:
Пример:
- х + у + г = 6
- 2y + 5z = −4
- 2x + 5y — z = 27
Аккуратно написано:
| x | + | y | + | z | = | 6 | |||
| 2 года | + | 5z | = | −4 | |||||
| 2x | + | 5лет | – | z | = | 27 |
Сначала удалите x из 2-го и 3-го уравнения.
Во втором уравнении нет x … переходите к третьему уравнению:
Вычтите 2 раза 1-е уравнение из 3-го уравнения (просто сделайте это в уме или на бумаге для заметок):
И получаем:
| x | + | y | + | z | = | 6 | |||
| 2 года | + | 5z | = | −4 | |||||
| 3 года | – | 3z | = | 15 |
Затем удалите y из 3-го уравнения.
Мы, , могли бы вычесть 1½ раза 2-е уравнение из 3-го уравнения (потому что 1½ раза 2 равно 3) …
… но мы можем избежать дробей , если мы:
- умножьте третье уравнение на 2 и
- умножьте 2-е уравнение на 3
и , затем выполняют вычитание … вот так:
И в итоге получаем:
| x | + | y | + | z | = | 6 | |||
| 2 года | + | 5z | = | −4 | |||||
| z | = | -2 |
Теперь у нас есть «треугольная форма»!
Теперь вернемся снова вверх «с обратной заменой»:
Мы знаем z , поэтому 2y + 5z = −4 становится 2y − 10 = −4 , затем 2y = 6 , поэтому y = 3 :
| x | + | y | + | z | = | 6 | |||
| y | = | 3 | |||||||
| z | = | −2 |
Тогда x + y + z = 6 становится x + 3−2 = 6 , поэтому x = 6−3 + 2 = 5
| x | = | 5 | |||||||
| y | = | 3 | |||||||
| z | = | −2 |
И ответ:
x = 5
y = 3
z = −2
Проверка: проверьте сами.
Общий совет
Когда вы привыкнете к методу исключения, он станет проще, чем замена, потому что вы просто выполняете шаги, и ответы появляются.
Но иногда замена может дать более быстрый результат.
- Замена часто проще для небольших случаев (например, 2 уравнения, а иногда и 3 уравнения)
- Устранение проще для больших ящиков
И всегда полезно сначала просмотреть уравнения, чтобы увидеть, есть ли простой ярлык… так что опыт помогает.
.